Pré-Projet d’aéronef autonome à décollage
vertical & à moteur thermique
Pre-Projet
« Libellule » / « Dragonfly » Pre-Project

Pré-étude :
Recherche d’une solution» hélicoptère ou autogire individuel et
« portatif » ULM (ultra - light).
Par
Benjamin LISAN. Date de création : le mercredi 16 novembre 2005. Date mise
à jour : 3/12/05.
1 Introduction
et but du projet
2.2 Le « Jetpack » de l’armée
américaine (1961)
2.3 Le « Ludion » de Sud-Aviation (1967 - France)
2.4 L’ultra léger motorisé : le delta-plane
motorisé (~1980)
2.4.1 delta-planes
motorisés avec hélice repliable (Mosquito, Relax …)
2.4.2 Deltaplane
motorisé avec moteur réacteur (« Jet bug »).
2.5 L’ultra léger motorisé : le paramoteur
ou parapente motorisé (~ 1985)
2.6 Hélicoptère kit ULM Ultrasport 254 en 1993
2.7 L’hélicoptère ultra léger (Airscooter II …)
en 2005
2.8 Une nouvelle piste : le Kamov Ka-56
3 Le
plus petit hélicoptère du monde : le GEN-H-4
3.2 Discussion de cette solution (avantage et
inconvénient)
4 Le
cahier des charges de l’appareil « idéal »
5 Les
premières pistes à explorer : les solutions hélicoptères et autogires
6 Discussion,
inconvénients de chaque solution
6.1 Discussion solution autogire
6.2 Discussion solution hélicoptère
7 Première
idée : sustentation / propulsion type autogire
8 Seconde
idée : sustentation / propulsion type hélicoptère contra-rotatif
9 Comment
développer la 1ère idée type « Paramotogyre » ?
10 Comment
développer la 2ème idée contra-rotative type
« Scoot-air » ?
11 Une
estimation approximative de son budget
13 La
sécurité, l’immatriculation et l’homologation
13.1 Dispositifs de sécurité sur cet autogire ou
hélicoptère autonome
14.1 Concernant la solution
« paramotogire » :
14.2 Concernant la solution contra-rotative « scoot-air » :
14.4 En conclusion (de cette conclusion
provisoire)
15 Adresses,
sociétés ou personnes à contacter pour ce projet
15.1 Adresses pour la solution
« autogire » « paramotogire »
15.2 Adresses pour la solution « hélicoptère
contrarotatif » « scoot-air »
15.3 Fabricants de pièces détachées auprès
desquels on pourrait se fournir
16 Annexe :
dossiers à constituer
19 Pour
contacter l’auteur de ce rapport - document
20 Annexe :
type de moteurs de envisageables
21 Annexe :
estimation de la puissance mini pour faire décoller un homme de 100 kg
1 Introduction et but du projet
Depuis longtemps, l’homme rêve de voler facilement, de façon autonome,
avec un engin léger, minuscule, peu encombrant, d’une mise en œuvre facile. Et
comme nous le verrons dans l’introduction historique _ chapitre suivant _,
l’homme a toujours rêvé d’un tel moyen de vol individuel, comme la
« ceinture volante » des récits de science-fiction.
Actuellement, il existe un hélicoptère US ultra-léger (ULM)
contra-rototatif, le Airscooter II, d’un poids de 70 à 80 kg, destiné à la
reconnaissance aérienne, _ et à cause de ses faibles dimensions _ à être
embarqué sur des navires (océanographiques, brise-glaces ….), enfin à l'aviation récréative. Cet hélicoptère,
présenté n 2004 et dont la commercialisation est annoncé en 2006, est
remarquable de précision au niveau pilotage, si l’on se fie au visionnage des
vidéos le concernant.
Sinon
juste à la fin de la rédaction de la première version de ce document, l’auteur
a découvert le plus petit hélicoptère du monde, un prototype japonais, le
GEN-H-4, de 63 kg à vide, pouvant transport un pilote de 86 à 80 kg maximum.
Les vidéo
montrent que c’est un hélicoptère délicat à piloter.
Actuellement, par contre, il n’existe pas d’hélicoptère de 40 kg ou
moins de 40 kg, ultra-ULM, portable sur le dos (comme un paramoteur), facile à
piloter, précis, facile à transporter partout, juste avec sa voiture, pour la
reconnaissance ponctuelle d’un endroit difficile d’accès (canopée d’une forêt
(tropicale), sommet d’un édifice …), d’un très faible encombrement, pouvant
décoller d’un terrain de très faibles dimension (< à 10 m x 10 m) _ come par
exemple, le pont d’un yacht … _ ou encore pour une utilisation ludique [1].
Le but de notre
projet et pré-étude est d’imaginer, puis de concevoir, un tel appareil
« idéal ».
Nous allons déjà aborder, dans le chapitre suivant, les différentes
solutions techniques imaginées pour résoudre ce défit. Nous aborderons les
solutions de types :
1.
propulsion à réaction de type fusée, avec un fluide propulsif froid ou
chaud (Jetpack, Ludion),
2.
delta motorisé,
3.
paramoteur,
4.
micro-hélicoptère à simple rotor,
5.
micro-hélicoptère à rotor contra-rotatif / coaxial (Ka-56, Air Scooter
II …),
6.
etc ….
Puis dans le chapitre qui suivra, d’après nous aborderons de nouvelles
solutions techniques pour tenter de parvenir enfin à la solution
« idéale » (micro-autogyre _ solution que nous examinerons mais à
laquelle nous ne croyons pas _, nouvelles solutions de micro-hélicoptères à
rotor coaxial).
Seront abordés :
·
le problème de la vitesse horizontale de décollage, pour une solution
« micro-autogyre »
·
pour les solutions micro-hélicoptères, le problème de l’instabilité
originelle de tout l’hélicoptère,
·
le calcul et la recherche du domaine de vol stable de tout hélicoptère,
·
le risque de collision entre les 2 jeux de pales contra-rotative, dans
la solution hélicoptère coaxial.
·
Le contrôle de lacet et d’anti-couple (qu’il soit manuel, électrique ou
électronique et inertiel) …
·
La limitation des
vibrations (fréquentes avec les hélicoptères).
·
Etc …
Même si au premier abord elles ne sembleraient pas évidentes, on peut
imaginer des solutions très légères, puisqu’il existe des moteurs 2
temps, de moins de 30 kg et de 40 Ch (suffisant pour soulever un homme de
80 kg, avec un pas classique d’hélicoptère).
Et on peut admettre quelques présupposé de bon sens, dont que toute
solution hélicoptère (ou autogyre) sera gourmande en carburant (il ne sera pas
envisagé une consommation passant sous la barre des 10 litres de l’heure).
Si vous voulez sauter
« l’introduction historique » _ abordant l’historique des véhicules
aériens individuel VTOL _,
et passer directement à la partie
technique et description de nouvelles solutions, alors cliquer ici.
2 Introduction historique
2.1 Le temps du rêve
1) L’homme a toujours
rêvé de voler comme un oiseau, sans trop de contrainte, ni trop de poids. En
particulier, il a eu souvent le rêve, d’un aéronef facile à transporter, facile
à mettre en œuvre pour des vols individuels, en aussi complète autonomie que
possible. C’était souvent le grand thème de Science-Fiction, des
« Comics » américains, depuis les années 27-30 aux années 80 (voir
ci-dessous), dont le concept de la « ceinture volante » du
héros Buck Rogers [2].
Sinon, qui n’a pas
rêvé, lors de gros embouteillages, de se rendre au bureau en hélicoptère,
plutôt qu’en scooter ou moto ?


2) Dans une aventure
de Spirou et Fantasio "Spirou et les héritiers", parue en 1952
chez Dupuis, le dessinateur belge André Franquin,
imagine une sorte d'hélicoptère portatif autonome appelé « Fantacoptère », à double jeu de pales
contra-rotatifs (tournant en sens inverse). Ce n’était qu’une vue de l’esprit.
L’idée du décollage
vertical permet, en théorie, de faire des décollages tout terrain, en se
passant de terrain d’aviation.






2.2 Le « Jetpack » de l’armée américaine (1961)
3) En 1961, a été conçu des engins individuels pour l’Armée
américaine, à décollage vertical et à propulsion par réaction (comme dans les
fusées), mais sans combustion (contrairement aux fusées). On en voit d’ailleurs un exemplaire, dans le
film « Fahrenheit 451 » de François Truffaut.



Le Jetpack
développé par BELL Textron, pour l’armée US [3],
en 1961.
L’appareil est très
léger, mais son autonomie de vol est très faible, inférieure à la minute (il
est aussi coûteux).
En 1969 Bell essaya de
construire une version à turbojet, dont l'autonomie atteignait presque 5
minutes.
2.3 Le « Ludion » de Sud-Aviation (1967 - France)
4) En 1967, les
sociétés Sud-Aviation et SNECMA présentent le Ludion, un autre appareil
individuel et autonome, avec un moteur fusée SEPR [4].
C’était un démonstrateur lourd et coûteux qui n’intéressa personne.



Le ludion
de Sud-Aviation (1967-1968) [5].
Moteur : SEPR Type : S178 (Destiné à
la propulsion du sustentateur individuel Ludion), Poussée : 180 daN, Pression générateur :
18-30 bar, Vitesse maximum : 100 km/h, Altitude maximum : 600 m, Autonomie : 30
min, Ergols : Nitrate d’isopropyle, Largeur: 1 485 mm, Longueur: 1 950 mm, Hauteur: 1 600 mm, Masse: ~ 90 kg, Technologie : Le nitrate d’isopropyle,
monergol chassé par de l’air comprimé à partir d’un réservoir, à travers un
catalyseur de décomposition, vers une enceinte en matériaux composites,
alimentait des injecteurs placés à l’entrée de deux trompes réalisées par
la société Bertin. Ces trompes, orientables, assuraient la propulsion du Ludion
et son pilotage.
2.4 L’ultra léger motorisé : le delta-plane motorisé (~1980)
2.4.1
delta-planes
motorisés avec hélice repliable (Mosquito, Relax …)
Ensuite, sont apparus
les Deltaplanes, équipés de moteurs auxiliaires (Relax, Minimum, Mosquito) [6] :



. Le « Mosquito » est équipé d'un petit
moteur (12cv, 8 kg) et petit réservoir (4 litres).
Son but est juste de rejoindre les nuages.

Le
« Relax », un chariot très léger (35 kg) en composites, équipé d’un
train arrière rentrant et d’une hélice repliable pour une utilisation "vol
libre".
Grâce à ces systèmes, on
pouvait transporter son aéronef avec sa voiture (sur la galerie).
Par contre, à chaque
fois, le temps de montage et démontage est long. Il faut aussi un terrain
d’atterrissage.
Il existe aussi un
delta-plane motorisé, « l’explorer », propulsé par un mini réacteur
de drone.
2.4.2
Deltaplane
motorisé avec moteur réacteur (« Jet bug »).
Le Jet Bug 2, est actionné par une turbine à gaz d'une
poussée de 95 livres de poussées., le HF15 (°), conçu par la société Microjet à
Cambridge [7].
Il a été présenté, le 30 avril 2003, à Sywell (UK).
Spécification du moteur HF15 :
Poussée : 18 livres statiques, Tr-min maximal :
152000, Proportion de pression :
3.3:1,
Consommation de Carburant : 220 ml/minute à 18
livres de poussées,
Type de Carburant : Paraffine ou Diesel et huile (pétrole) de 2 temps 2 %
Dimensions : 90 mm de diamètre x 190 mm de
longueur, Poids : 2.2 livres
Source : http://crosencdeltaplane.fr/turbo.htm


Sources sur le « Jet Bug » : http://crosencdeltaplane.fr/jetbug..htm
http://www.microjeteng.com/jetbug_pics.html
http://www.topmodel.fr/article.php?ret=archiv&art_id=26&sid=b7f91ee1b94f1ed3dbb2959607f4b784
https://www.topmodel.fr/article.php?ret=archiv&art_id=26&sid=47060dfad0287968d7a4a022691b7f53
Discussion : Le poids de l’aide du deltaplane est entre 30 ou 35 kg (25 kg pour
les poids pilotes < à 60 kg). On doit ajouter le poids de la motorisation
auxiliaire : ~ 10 kg de plus. Donc un poids total de ~ 45 kg. La longueur du deltaplane replié dans
sa housse fait environ 4,5 à 5 m. On peut estimer à ~ 10 mn mini pour le temps
de repliage ou de dépliage + installation du moteur (temps rapide). Leur
vitesse maximum entre 75 ou 90 km (voire 100 km/h pour ceux de compétition,
plus délicat à piloter), ce qui est nettement plus élevé que les paramoteurs
(voir ci-après). Comme les paramoteurs, ils sont sensibles à la turbulence et
au vent : max ~ 30 km/h. Il leur faut une piste d’envol et d’atterrissage.
En un mot, ils sont encombrants, pas toujours faciles à monter, et plus
sensible à la turbulence qu’un hélicoptère miniature (type GEN-H-4, par
exemple, etc… Voir plus loin).
2.5 L’ultra léger motorisé : le paramoteur ou parapente motorisé (~ 1985)
6) Ensuite, il y a eu
l’invention du paramoteur. Cette fois-ci, l’engin est facile à déplier
(déployer) et à transporter dans la voiture (un break en général, une voiture à
hayon arrière, ou une camionnette).
Il nécessite la
connaissance du pilotage du parapente et de l’ULM. Si le vol en l’air et
l’atterrissage sont relativement faciles. Le décollage est plus délicat. Il
faut courir très vite (sauf si l’on a du vent de face), avec un poids sur le
dos de presque 30 kg. Ce qui est très physique et pas donné à tout le monde.
C’est un engin relativement lent (entre 20 à 40 km pour les plus rapides), ce
qui permet d’apprécier le paysage avec une autonomie d’environ 20 hm. Il ne
peut voler que par vent faible (maximum 30 km de vent météo extérieur). Faible
consommation: 6 litres à 10 litres
pour 2 h.
Avec une motorisation
puissante (mais plus lourde), on peut décoller avec une distance courte (>
50 m).
Au décollage, il
nécessite un terrain de décollage court, dégagé d’obstacle (longueur < 100
m).



1)
le paramoteur en l’air,

2)
Toutes les façons
possibles de décoller en paramoteur (en tirant la voile, à soi, puis dès qu’on
l’a amené au-dessus de soi, à pivoter sur soi-même, puis à courir très vite
vers l’avant, avec la voile toujours maintenue, le bord d’attaque rectiligne,
perpendiculaire à son cap, le centre de la voile à la verticale de son corps et
placée haut, juste au-dessus de sa tête).
2.6
Hélicoptère kit ULM Ultrasport 254 en 1993
|
|
Diamètre du rotor : 6.4 m |

En Juillet
1993, est paru, aux USA, l’hélicoptère Ultrasport
254, monoplace, construction en kit, pour $35000 US.
C’est un hélicoptère
ultra-léger de 254 livres. À moins de
254 livres, l'Ultrasport 254 est un véritable hélicoptère ultra-léger aux
Etats-Unis, conformément à la réglementation des ULM de la FAA, annexe FAR
103 (FAA ultralight regulations FAR
Part 103). L'Ultrasport 254 est équipé
d'un moteur Hirth 2703-55hp, une transmission avec boîte de vitesse + système
planétaire, un système de rotor à rendement élevé, couplé à une paire de pales
de rotor principales en composite et de quatre lames de rotor de queue en composite. En option : le moteur et les flotteurs de Hirth 2706-65hp. http://www.ultralightflyer.com/americansportcopter/
Poids à vide de
l’hélicoptère ULM monoplace: 252 livres.
(115 kilogrammes.)
Charge Utile: 273
livres. (124 kilogrammes.) / Poids Brut: 525 livres.
(239 kilogrammes.)
Réservoir de
carburant *: 5 gallons (19 litres) *
/ Résistance / endurance (autonomie ?) : 1,25 heures
Vitesse minimum: 0
/ Vitesse De Croisière De Vol plané: 55 noeuds
(63 M/H) (101 km/h). / Vne *: 55 noeuds *
Transmission : Boîte de vitesse à planétaires : 12:1: / Puissance
: HP 55 (Hirth 2703) / (ou 65 HP
Hirth 2706 facultatif). / Pales de rotor principales: diamètre de 2 x 21 pieds 6,7 chord.
Lames de rotor de
queue : diamètre de 4 x 2,6 pieds, 2 pouce à la corde ( ? - chord)
largeur : 8 pi (2438
millimètres) / Hauteur : 7 pi.
10 pouces (2388 millimètres)
Longueur : 19
pi. 2 pouces (5842 millimètres) quand
les pales sont repliés.
Pour information : Il existe un autre hélicoptère en kit mais
bien plus lourd : le "RotorWay Exec 162F de RotorWay International,
4140 West Mercury Way, Chandler, Arizona 85226 USA, Phone: (480) 961-1001 /
Fax: (480) 961-1514 Email: rotorway@rotorway.com
, http://www.rotorway.com/ (prix $67750 US) Poids vide : 975 lbs.
(442 kg).
2.7 L’hélicoptère ultra léger (Airscooter II …) en 2005



La société Airscooter,
et son inventeur Elwood “Woody” Norris, a présenté, au salon de San Francisco
en mars 2004, cet appareil, un hélicoptère contra-rotorique ultra-léger, qui
devrait être commercialisé en 2006 :
Autonomie : 2 H (conso. 19 L / 5 Gallons). Vitesse
maxi : 100 km/h / 55 noeud/h. Poids à vide : 70 kg ( !!) -
155 pounds. Longueur de chaque pales alu : 14' (pieds) - 4,2 m. Ce qui
fait une envergure de 8,5 m (longueur parfaitement acceptable). Poids à vide
: 70 kg ! (à cause des effets d’annonce,
comptons peut-être en fait, 100 kg). Charge utile transportée : 158 kg (350
Lbs/pounds). Hauteur : 11' (3.35 m), largeur : 7' (2.13 m), Longueur
: 12,5' (3.65 m). Moteur AeroTwin 65 CH 4 temps (poids : 95
lbs / 43 kg). Fonctionne avec de l’essence d’indice d’Octane de 91UL
minimum (donc, il semblerait qu’on puisse utiliser que l’essence voiture 95 ou
98).
Le poids du
“Airscooter” est extraordinaire pour un vrai hélicoptère. Ses 4 pales, de 4,34
m (14 pieds) de long, chacune, sont en aluminium coaxial ( ?) extrudé. Le
poids du moteur lui-même est une vraie performance ! Ce moteur 4 temps
ultra-léger (le plus léger en 4 temps du marché) a été dessiné et
construit spécialement pour l’AirScooter II. Ce dernier utilise, dans sa
construction, des alliages d'acier, d'aluminium très léger, un alliage de
titane, des composites à base de fibres de carbone, des panneaux de fibre de
verre, des tissus enduits d'uréthane et des sangles en nylon. Il semblerait que
cet hélicoptère ait aussi une excellente manœuvrabilité. Source : www.airscooter.com
Selon une autre
source, l’appareil pèserait ~ 300 pounds (lbs) / 136 Kg. Il sera vendu moins de < $50,000 US.
A 136 kg, c’est l’hélicoptère 1 place le plus léger au monde (Source : http://www.engadget.com/entry/1234000433040402/
).
En conclusion, cet
hélicoptère est « léger » (113 kg), très précis et fiable au niveau
pilotage, mais pas l’ultra léger que l’on recherche (proche des 40 kg). Il est
encore lourd. Et sa consommation en carburant, nous semble un peu faible et
très optimiste.
2.8 Une nouvelle piste : le Kamov Ka-56
Le Ka-56 a été créé, pour l’armée russe, par Kamov en 1998. Il peut être rangé dans un tube de torpille de 533mm. Il n’a jamais été piloté. Source : http://airbase.ru/alpha/rus/k/ka/56/ & http://twistairclub.narod.ru/ka56/indexengl.htm









Kamov Ka56 « la guêpe » (« Osa » en russe), 1988 : 254 lbs / 115 kg à vide, 220 kg à pleine charge, propulsé par une turbine ou moteur rotatif de 40 Hp (1er développements : 1971). Performances (calculées): rayon d’action : 150 kilomètres, vitesse de croisière : 110 kmh, plafond : 1700 m. Diamètre rangé : < 50 cm, longueur pales : ~ 3 m, Concepteur : Sergei Fomin, de Kamov.
Discussion :
Le principal problème
est que Kamov n’aurait réalisé cette maquette ou ce prototype pour montrer sa
faisabilité, mais qu’il n’aurait jamais volé avec un homme à bord. Sinon, son
système de montage et démontage des pales semble très ingénieux. Sinon, sur les
photos, on ne distingue pas si cet hélicoptère est muni d’un vrai rotor coaxial
à pas variable, miniature, ou juste d’un maquette d’un tel rotor. Cela serait
intéressant de le savoir, pour au cas où s’en inspirer.
3 Le plus petit hélicoptère du monde : le GEN-H-4
Au moment, où
l’auteur a débuté cette étude et ce document, il n’était pas au courant de
l’existence de cet hélicoptère miniature, le plus petit du monde, développé au
Japon, appelé le GEN-H-4. Cet appareil se rapproche assez des spécifications
désirées par l’auteur. Dans la page suivante, nous allons examiner les
spécifications, les avantages et inconvénients de cet engin.



Le GEN-H-4 en vol et posé.
3.1 Spécifications du GEN-H-4
Moteurs : 4 x moteur 2 cylindres à plat, 125 cm3
(GEN-125).
Puissance maximum de chaque moteur :
10hp à 8500 rpm.
Coupe maximum : 0.86 kgm / 6,500 rpm, Carburant
2 temps (30 :1), Poids de chaque moteur : 2.8kg (6.2 lb).
Dimensions de chaque moteur :
203.5mm x 280mm x 160mm.
Direction de la rotation : sens inverse des
aiguilles d’une montre.
Les commandes, boutons et voyants sur la « barre de
contrôle » :
1)
interrupteur principal,
2)
interrupteur de contrôle de lacet [ou anti-couple ?]
automatique (« automatic yaw control »),
3)
commande / manette de contrôle de lacet (empêche le
tangage ?),
4)
bouton du démarreur (starter).
5)
Manette des gaz (throttle).
Autonomie : 1 h, avec 5 gallons (18.9 litres / heure) pour un pilote d’environ 70
kg (155 lb.).
Poids à vide : 63 kg (140 lb.), Vitesse
maximum : 55 Mph (~ 85-90 km/h), Hauteur
de l’appareil : 2,4 m (8ft),
Diamètre du rotor
: 4 m (12ft), Vitesse de rotation du rotor en vol normal : 800-900 rpm
Composition des pales du rotor : composite carbone /Kevlar (CFRP composite).
Matériaux du reste de l’engin : tubes d’aluminium (pour absorber les chocs), réservoir en magnésium.
Poids maximum : 171 kg
(380lbs) (autorise un pilote jusqu’à 86
kg (190 lbs) de voler).
Autorotation impossible : afin que l’hélicoptère reste simple de conception et facile à piloter, le pas du rotor est fixe et donc l’auto-rotation est impossible, Vitesse de croisière : 100 km/h (60 mph),
Altitude maximum estimée : 3,000m (10,000 ft), VNE : 200 km/h (120 mph), TBO : 500 heures.
Nombre de tours / mn de chaque moteur, en vol normal :
7000 rpm à 8000 rpm, Démarreur électrique.
Contrôle du "lacet" : Il est contrôlé à travers un
engrenage différentiel inclus dans la transmission.
Un moteur
électrique ajuste la position de l'engrenage différentiel, qui change la
vitesse des pales contra-rotatives les unes par rapport aux autres, ce qui provoque
un couple sur l'hélicoptère, et entraîne un mouvement de rotation dans
n'importe quelle direction choisie par le pilote.
Au niveau de la
« barre de contrôle » :
Contrôle de
« roulis » :
par la barre de contrôle qui contrôle les déplacements de toute la tête du
rotor.
Contrôle de
"lacet" : par
une manette (main gauche, à travers un engrenage différentiel contrôlé
électriquement).
Contrôle
d’altitude :
par une manette des gaz (main droite)..
Prix : US$35,000.(3,600,000yen),
sous la forme d’un kit 50 h.
Constructeur : GEN CORPORATION (Engineering System Co.), 5652-83 SASAGA, MATSUMOTO-shi, NAGANO-ken, JAPAN 399-0033. E-mail : aviation@gen-corp.jp
http://www.engineeringsystem.co.jp (c’est dans les Alpes japonaise, proche de
Nagano).
Distributeur USA
: ACE CRAFT, Richard Plummer, Dealer email: rcplummer@iglide.net , Jon Plummer,
Pilot email: plummer@byu.edu http://www.acecraftusa.com/
Les dispositifs techniques révélés sur le site du
constructeur de l’appareil.
3.2 Discussion de cette solution (avantage et inconvénient)
Cet appareil est le plus léger du marché (63 kg à vide). Par
contre, ses trépieds longs, et surtout son centre de gravité placé très haut
font qu’il n’est pas facile à ranger et démonter dans une voiture et aussi pas
aussi facile à piloter qu’il n’y paraîtrait au 1er abord. Les
démonstration de l’appareil en vol, sur les vidéo, montre un appareil délicat à
piloter.
Sinon, l’appareil est très simple de conception, y compris
son contrôle électrique de lacet. Mais il est très cher.
Un gros handicap lié à la simplicité de conception est
que ses pales sont à pas fixe, empêchant toute autorotation, facteur de
sécurité. La sécurité est assurée par la présence de 4 moteurs en
fonctionnement simultanée et le fait que le GEN-H-4 peut encore voler sur seulement
3 moteurs.
4 Le cahier des charges de l’appareil « idéal »
Mais cet appareil
n’est pas encore l’appareil de sustentation et propulsion individuel auquel on
rêve mais on s’en approche. Le cahier des charge, de
l’appareil idéal, serait :
1)
Ultra-léger (Ultra-light,
ultra-ULM), qu’on pourrait presque porter sur son dos (si possible inférieur à
40 kg, carburant compris) _ pour cela utilisation de matériaux de haute
technologie (carbone …),
2)
à décollage et à
atterrissage vertical (tout terrain),
3)
d’une certaine
autonomie, en vol, d’au moins 2 heures,
4)
facile à piloter, très
maniable, d’une grande manœuvrabilité (effet gyroscopique maîtrisé),
5)
facile à monter ou
démonter (opération facile et rapide en moins de 15 mn, si possible),
6)
qu’on peut transporter
facilement dans ou sur sa voiture (par exemple sur le toit),
7)
et facile à ranger dans
son garage ou sa maison,
8)
de peu d’entretien
(pièces très bien calculées, surdimensionnées, pour éviter leur usure et leur
remplacement).
5 Les premières pistes à explorer : les solutions hélicoptères et autogires
Pour réaliser ce
cahier, on s’orienterait alors vers les solutions type hélicoptère (voire mieux
contra-rotorique _ rotor coaxial) ou autogyre.
L’avantage de la voilure tournante est leur plus faibles sensibilité à
la turbulences, contrairement aux solutions ultra-légères motorisées (delta
avec moteur auxiliaire, paramoteur ...).
On
envisagera une solution type « autogire », puis type
« hélicoptère contra-rotorique » (en fait, l’idée du dessinateur
André Franquin).
Des questions aussi
importantes que :
a)
l’effet gyroscopique
(avec son moment d’inertie) pouvant provoquer des comportements imprévus, lors
des changements de direction et d’assiette (en tangage, en roulis et en lacet).
Comment le limiter (par exemple, par l’augmentation de la longueur des pales,
pour en diminuer leur vitesse angulaire et la diminution de leur poids par
l’utilisation de matériaux de haute technologie _ carbone) ?
b)
la rotation
involontaire possible en lacet. Comment la limiter … surtout dans le cas de la
solution « rotox coaxial » ?
c)
la stabilité en l’air
et en vol (éviter les effets de « marsouinage», de « twist »,
de rotation involontaire en lacet …),
d)
la sécurité de tels
engins (a) faut-il ajouter des « systèmes asservis », des
« centrales inertielles » avec gyroscopes et accéléromètre pour
assurer ou renforcer la stabilité de ces aéronefs en vol ? b) quel type de
pales très rigides pour la solution contra-rotative ? etc. …).
e)
La puissance du moteur,
pour soulever un homme de 80 à 100 kg, et le poids du moteur, à une altitude de
5 à 10 m, pour une vitesse de déplacement horizontal de 60 km/h.
devront à examiner,
avec soin, dans la suite de ce document.
Il faudrait voir si avec le moteur de paramoteur le plus
puissant, le Back Haw MZ34 [8],
qui a une puissance de 32 CH, pour un poids à vide de 26,7 kg (tout équipé avec
son démarreur et son pot d’échappement), avec un système de pales en composites
très performantes, s’il peut soulever, jusqu’à 10 mètres de hauteurs, un homme
de 80 kg, le poids du moteur, soit 27 kg, le poids du carburant (6 à 7
kg) : soit environ ~ 114 (115) à 120 kg ?
Sinon, un ensemble de 35 à 40 kg avec le carburant, à déplacer, voir à soulever par un homme solide, peut être parfaitement envisageable. On peut très bien imaginer des petites roulettes, au niveau du trépieds dessiné sur la figure 2. de la solution « scoot-air », plus loin dans ce document et déplacer l’ensemble, sur ces roulettes, comme un diable, jusqu’à la camionnette. On pourrait imaginer que les pales soient abaissables et « repliables » comme celles des hélicoptères de l’aéronavales (ceux embarqués sur les portes avions), afin que les pales se replient le long du corps de « l’aéronef ». Tout dépendra aussi de la longueur des pales (si elles font 4 mètres ou bien 7 mètres de long).
Ou bien encore amovibles, détachables comme celles du prototype d’hélicoptère, (dé)pliable en 10 mn, Ka-56 .
Selon la longueur calculées des pales, on pourrait alors ranger soit l’ensemble « sellette – moteur – tête rotor – pales repliées » dans une camionnette ou sur le toit d’un véhicule (posé sur une échelle, elle-même posée sur la galerie d’un véhicule). Sinon, pour protéger les pales lors de leur transport, elles seront rangées dans de grandes et longues housses rembourrées (au total 4 housses pour les 4 pales). En plus pour protéger tout l’ensembles durant le transport, une autre housse, munie d’un zip en faisant tout le tour, de très grande dimension, rembourrée, permettra de couvrir la partie moteur / siège-sellette, pour le transport, et contre les intempéries ou l’humidité (et enfin une housse pour envelopper le tout). Une bande rembourrées pour protéger la partie tête de rotor. Toutes ces housses et bandes sont fermées par des scratchs ou des bandes scratchs. La grande housse devrait être très solide (résistante à la déchirure amorcée) et munie d’au moins 6 solides poignées. Adventure, pour les pales des hélices de ses paramoteurs, fournit des housse de pales rembourrées très solides et légère. Et pour son paramoteur F1, Adventure fournir une sorte de sac ou sacoche de transport rembourrée (tissu épais), très solide, munie de forte poignées très solides. L’idéal serait que la housse extérieure soit étanche comme un sac de canioning ou de spéléologie.
Note : le constructeur de vélo hollandais Jansen
fournit pour le vélo pliant « Renault Sport » une housse très solide
(mais non rembourrée). L’idée d’une housse extérieur pour la protection de
l’ensemble pendant son transport est mieux qu’une ogive de transport de
l’ensemble en aluminium ou en composite (ou en polyesther etc. …).
Durant le transport, le(s) robinet(s) d’essences seront
fermés (à voir la compatibilité de ces derniers robinets, avec la sécurité en
général _ lors du transport, en vol etc …)..
Le caractère repliable des pales du rotor, peut rendre la
tête du rotor encore plus complexe à réalisée et donc encore plus chère,
surtout si elle est un prototype (quel prix ? 2500 Euros ? aucune
idée pour l’instant) [9].
Pour pouvoir replier facilement les pales dans la housse, il
faudrait a) que la partie bloc moteur – siège – réservoir soit fin (peu épais)
dans le sens de l’axe sagittal (c’est à dire dans l’axe qui passe d’avant en
arrière) _ ce qui contribuerait alors à un centre de gravité bas _ et b) que la
tige coaxiale conduisant à la tête de rotor soit longue.
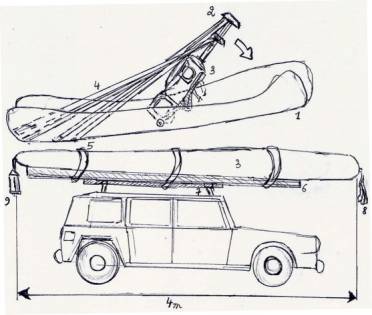
Figures 5 & 6 rangement et le transport du « scoot-air » : 1) housse rembourrée un peu plus longue que la longueur des pales (> 4 m), 2) tête de rotor avec ses articulations pour le repliement des pales le long de l’engin (pour son transport), 3) l’engin, 4) les pales repliées et regroupées ensemble pour leur transport, 5) rubans scratchs pour refermer et fixer la housse sur la plate-forme de transport (ici une échelle de 4 m de long), 5) l’échelle, 7) la galerie de toit suffisamment solide pour supporter l’échelle et le « scoot-air » (40 kg), [ 8 et 9) chiffon et lampe rouges de signalisation sur la route ].
Si nos
calculs prouvaient que ce moteur MZ34 n’est pas capable de soulever un poids de
120 kg, à 10 m, et de le déplacer, dans une translation horizontale d’une
vitesse de 40 à 60 km/h, cela serait alors l’échec de ce projet. Car on devrait alors envisager de passer aux moteurs
pour ULM pendulaires ou 3 axes, type Rotax 582 (65 Cv) d’un poids de 37.3Kg
nu, (°) ou 912 (81 Cv) beaucoup plus lourd _ de l’ordre de 42 kg à 55 kg (+).
(°) Rotax 582 UL
DCDI 65CV (Puissance max 65CV / 48KW @6500 RPM, 64.4lbs / 29.2Kg
nu, (avec système d'échappement (11.2lbs / 5.1Kg),
Filtre à air (0.7lbs / 0.3Kg), radiateur double (6.0lbs / 2.7Kg), sans réducteur, sans démarreur électrique :
82.2lbs / 37.3Kg, avec Réducteur B, sans démarreur électrique : 92.1lbs
/ 41.8Kg _ poids réducteur ~ 4,5 kg). (source : http://www.piecesrotax.com/moteurs_rotax/rotax_912.htm
).
Même version moteur
nu + radiateur double + réducteur B + filtre (mais sans pot
d’échappement) : 36,7 Kg.
(voir aussi le
Moteur Hirth 7302 55 hp, 34,5 kg, plus loin).
Sinon,
nous ne renoncerions pas pour autant, car il existe une société hollandaise
fabriquant de micro-tuboréacteur pour drone, chaque réacteur pesant moins de 10
kg (au prix de 7500 € - 50000 FF pièce) [10].
Et MICROTURBO à Toulouse développerait, actuellement, une micro-turbine à gaz
de moins de 40 kg.
Mais en
passant à ce type de solution beaucoup plus coûteuse, on abandonnerait alors
« l’esprit paramoteur » (et l’idée de vol « populaire »,
« distrayant » et ludique).
(voir justement le
chapitre « 17. Annexe : estimation de la puissance pour faire décoller
un homme de 100 kg », sur ce problème de puissance minimum nécessaire
au décollage …).
Sinon, l’élément
peut-être le plus coûteux sera la tête de rotor « contra-rotative »,
si l’on choisit cette dernière solution. Elle devrait être particulièrement protégée.
6 Discussion, inconvénients de chaque solution
Dans tous les cas, la mise en rotation des pales, juste
après le démarrage du moteur, au décollage, est difficile (assimilable au
démarrage d’une voiture en 5°). (peut-être serait-il plus rapide avec notre
« libellule »).
6.1 Discussion solution autogire
Une vitesse de roulage trop rapide en regard des tours rotor
peut entraîner le "battement" des pales, celles-ci se mettant à
battre d'une butée à l'autre et pouvant endommager sérieusement la tête du rotor
et les pales au décollage.
Voler à G nul ou négatif ou avec une trajectoire ascendante
en forme de cloche est mortel au autogire.
L'oscillation induite par le pilote (PIO) ou
« marsouinage » qui touche surtout les débutants, se traduit par un
mouvement de tangage de l'appareil qui, alternativement, monte et plonge de
plus en plus brutalement. Cette oscillation non contrôlée peut devenir
destructrice : les pales touchent l'hélice ou la dérive, ou bien le rotor passe
en G négatif et n'est plus alimenté. C’est le principal défaut reproché à
l’autogire.
6.2 Discussion solution hélicoptère
Le pilotage exige de la concentration dans toutes les phases
du vol car il est nécessaire d'agir en (quasi) permanence et simultanément sur
toutes les commandes pour le piloter. L'hélicoptère ne peut pas, à l'instar
d'un avion, être réglé (trimé) pour voler droit sur sa trajectoire. En
stationnaire il est impossible de lâcher les commandes.
Le coût de la formation hélico : 45 et 50 heures de vol
au prix moyen de 300 € (2 000.00 FF)
par heure.
Consommation en essence élevé, d’un hélicoptère : 15 L
/ h pour l’Ultrasport 254. 10L / h pour l’Airscooter II.
L'hélicoptère est une machine complexe du fait de ses
nombreuses pièces en mouvement. Dans sa conception et sa construction il fait
appel à toutes les technologies de pointes (titane, carbone, élastomère,
Kevlar,..) coûteuses à développer et à fabriquer. L'ensemble des contraintes
dynamiques générées par les rotors (vibrations, force centrifuge, précession
gyroscopique) et aérodynamiques (Vortex, perte de portance des pales) se
répercutent, à des degrés divers, sur l'ensemble de la machine (fuselage,
moteur, transmissions, équipements,..). Il est nécessaire d'étudier l'ensemble
des phénomènes et d'en tenir compte lors de la conception du moindre élément.
Chaque pièce étant soumise à de forte contrainte leur durée de vie est plus
courte et leur remplacement conditionne directement la sécurité du vol. Cette
complexité générale à pour résultat direct un coût d'achat et d'entretien très
élevé.
7 Première idée : sustentation / propulsion type autogire
La présentation de cette idée est sur ce dessin
ci-après :
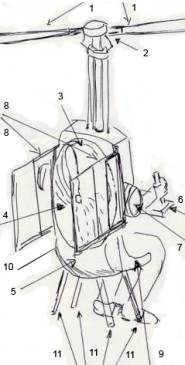
Figure 1 : Explications : 1) simple voiture tournante, avec 2 pales
d’hélicoptère ou d’autogire en carbone, dural ou composite, 2) tête de rotor
(au milieu), avec son frein, 3)
« panier à salade », une cage (en alu) renforcé de fils de nylons
pour protéger l’hélice et les hommes, des risques d’accidents, 4) hélice bipale
ou tripale en composite (celle qui sera protégée par le « panier à
salade », 5) Réservoir(s) (ils sont situés dans le dos vers le bas de la
sellette), 6) On pourrait imaginer les commandes _ de la forme de commande de
Joysticks _ situées de chaque côté du
pilote, comme placées sur les poignées d’un siège (s’inspirer de la position
des commandes du « Jetpack » décrit plus haut. Dans la cas d’une
solution hélicoptère, à gauche il y aurait la commande du
« collectif » et à droite la commande du « cyclique »).
6bis) un tableau de bord avec ses instruments (°), 7) moteur de paramoteur très puissant (type Rotax, Solo, Arrow,
Jpx …), 8) 2 volets verticaux (sorte de
« dérives ») dont l’orientation est actionnée / dirigée par une
manette du tableau de bord ou des poignées situées de chaque côté du pilote
(comme pour le Jetpack), permettant selon leur orientation à gauche ou droite, de diriger le souffle d’air de
l’hélice, à G ou à D, pour diriger l’aéronef, à G ou à D, et pour contrer le
couple, 9) Emplacement a) d’un Airbag situé sous le siège – sellette, b) d’un
parachute pyrotechnique (situé et dirigé sur le côté. Il ne être déclenché que
si le rotor (la voilure tournante) est à l’arrêt). 10) Sellette en carbone,
munie d’une poignée de secours, pour arrêter, en presqu’en même temps et dans
cet ordre : a) le moteur, b) la rotation du rotor, c) et déclencher le
parachute pyrotechnique (sur le côté la sellette, de l’autre côté, par rapport
à l’air bag). 11) Trépied de stabilisation et de soutien pour le décollage et
l’atterrissage. 12) On pourrait imaginer un sac à dos souple ou une poche (en
toile de parapente), placé dans le dos de la sellette, pour le transport
d’affaires, d’objets …. On pourrait imaginer une partie du trépied, en tube
d’aluminium / dural, en forme de triangle, dont la pointe arrondie et munie
d’une roulette en caoutchouc pour le roulage. Partie repliable, pour son
rangement, ou bien encore en vol, contre les flanc de l’appareil. 14) De chaque
côté des cuisses, il y aurait une sorte de « palpeur » qui lorsqu’on
incline les cuisses se penchent d’un côté ou de l’autre, agissent sur
« l’anti-couple ». On pourrait, comme en parapente, aussi
« piloter à la sellette », celle-ci étant posée alors posée comme une
sorte de « balance » (cette dernière comportant un point neutre).
(°) Le tableau de bord serait posé sur un tube en dural,
arqué, devant le pilote. Il se serait relié que d’un seul côté à l’aéronef, et
pourrait s’ouvrir, vers le haut, afin de pouvoir laisser passer facilement le
pilote (sinon, l’ensemble pourrait s’ouvrir et s’écarter pour laisser passer un
gros pilote. Ensuite le « système » se « refermerait », en
position verrouillée, avec un cliquet (ou bien maintenu en place par la
gravité), sur une des « poignées du fauteuil » _ voir plus haut). Les
commandes de vol et le tableau de bord devraient être particulièrement bien
étudiée au niveau de l’ergonomie _ prise en mains, fatigabilité de la main et
du bras, facilité de manœuvre .. Sur le tableau de bord on trouverait un
compte-tour du moteur, un autre pour le rotor, une jauge à essence, un compas,
une température moteur, une alarme de niveau d’huile, un bouton coupe-circuit
électrique (bien visible en rouge), un niveau à bulle etc.
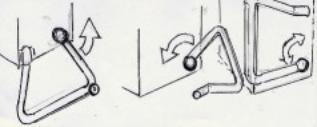
Fig.
1b. : Les 2 trépieds, de chaque côté, se replieraient ainsi le long des
flancs latéraux de l’appareil, en vol ou rangé.
L’idée est de s’inspirer de la construction des autogires
(autogyres) _ voir photos ci-dessous.


Photos
provenant de l’Autogire club de Mimizan.
L’idée est de construire un engin léger autonome, entre le
paramoteur et l’autogire, et d’une construction simple, comme celle d’un
autogyre.
L’idée serait de faire une sorte de « Paramotogire »,
à mi chemin entre l’autogire (pour sa voilure tournante) et le paramoteur (pour
son poids et sa transportabilité).
La taille de « l’empennage » (des volets de
directions _ c’est à dire de la « dérive ») devront être d’une
dimension suffisante.
8 Seconde idée : sustentation / propulsion type hélicoptère contra-rotatif
Cette idée a déjà été imaginée depuis le début du siècle et
Sikorky en avait fabriqué un, à ses tous débuts, dans les années 40. La Hiller
Helicopters (Us) en avait construit aussi plusieurs modèles, dont les Hiller
X44 [11]
et 2C.

La société Gyrodyne (Us) a fabriqué des hélicoptères
contrarotatifs, dont des drones comme le XRON [12],
radiocommandés, pour l’armée US (voir ci-dessous).

Régulièrement des constructeurs amateurs, construisent des
hélicoptères contrarotatifs.

Inspiré de
XRON-1 de Gyrodyne. avec a) moteur Porsche 55 Hp, rotor 17 ft, poids 662 lbs
(298 kg), b) Turbine Solar 55 Hp, 17 ft, poids 667 lbs / 300 kg, c) Porche 72
Hp, 4 T, diamètre rotor 20 pieds, Poids total : 900 lbs / 405 kg
Source :
http://www.gyrodynehelicopters.com/xron_history.htm
Le grand spécialiste des hélicoptères contrarotatifs, le
russe Kamov, présentant plusieurs modèles civils et militaires.



Hélicoptères
KAMOV (russes).
Discussion :
Un système contra-rotatif très léger, comme celui du « Fantacoptère »
n’est pas aisé à imaginer.
Un inconvénient (pour cette idée) serait peut-être ( ?)
la difficulté de maîtriser le couple, ce dernier ayant tendance à faire
« twister » la personne (la faire tourner comme une toupie), sur
elle-même dans un sens.
Pourtant, les systèmes contra-rotatifs fonctionnent sans
inconvénients. Et des constructeurs, qui ont tous misés sur la technologie contra-rotative _ comme le constructeur
d’hélicoptère russe KAMOV, qui n’y voit que des avantages.
Mais pourtant, partout des systèmes contrarotatifs, dont des
constructions hélicoptères « ultra-légers » voient le jour de par le
monde. Sinon, par ailleurs, on pourrait penser que la pale du dessus aura un
moins bon rendement à cause de la traînée de turbulence induite par le 1er
jeu de pales (à vérifier).
Nous appellerons cette seconde solution « Scoot-air ».
9 Comment développer la 1ère idée type « Paramotogyre » ?
Plusieurs étapes seraient nécessaires :
1)
phase de calculs aéronautiques (par des ingénieurs
aéronautiques, des sociétés de paramoteurs _ Adventure SA … _ ou/et
d’hélicoptères ULM _ type Dragon Fly en Italie),
2)
phases de réalisation avec des constructeurs d’autogires
amateurs, de la version à taille 1 :1 radiocommandée (idéal serait que cet
autogyre soient réalisés par ceux de l’Autogire-Club de Mimizan et des
contructeurs amateurs d’avions et hélicoptères radiocommandés).
3)
Phase de tests, de la version radiocommandée, avec une
charge égale à celle d’homme de 80 km, sur une distance d’un km, à une hauteur
maximum de 5 mètres de hauteur. L’engin est piloté en coopération avec un
spécialiste du pilotage d’hélicoptère radiocommandé).
4)
(On pourrait ensuite faire l’essai avec un chien
entraîné pour cela).
5)
Puis phase d’essai avec un pilote d’autogire et de
paramoteur expérimenté. On fera tous les tests d’homogation (test habituel pour
un hélicoptère : tests de manœuvrabilité etc. …).
6)
Dans un second temps, si les tests du 1er
prototype de l’autogire individuel sont concluant, construction d’un second
prototype (lui non radiocommandé), si possible entièrement démontable, afin que
l’on puisse transporter cet engin dans un grand break _ les pales étant placées
sur une échelle, posée sur la galerie de toit de la voiture _, ou dans une
camionnette _ style J7, Boxer etc. …
10 Comment développer la 2ème idée contra-rotative type « Scoot-air » ?
Normalement, il n’y a pas risque
« d’auto-rotation », c’est à dire que le pilote et son engin ne cesse
de tourner par rapport à l’axe vertical, puisse que les 2 jeux de rotors
tournent strictement à la même vitesse (en sens opposé).
La pièce maîtresse sera la tête de rotor coaxiale ou tête de
rotor contra-rotative, qui doit être fabriquée avec soin.
Elle sera soit en carbone, soit en titane, en tout cas pour
les pièces les plus fragiles, de celle-ci (le reste étant peut-être en alliage
d’aluminium – lithium).. Elle doit être calculée et réalisé par des
spécialistes comme la société russe Kamov.
Pour la révision des 50 heures et 200 heures de vol,
peut-être faudra-t-il démonter et radiographier la pièce, pour vérifier qu’il
n’y a pas de défauts de fatigues ou de « crics » (micro-fissures).
Pour ce qui est du déplacement horizontal, en vol, de
l’ensemble engin - pilote, elle dépendra de la légère inclinaison du collecteur
de la tête de rotor. Pour ce qui est de la rotation de l’ensemble par rapport à
l’axe vertical, on peut imaginer un aileron vertical (dérive) dans le dos du
pilote, qui par son « incurvation » (sa courbure), soit à gauche,
soit à droite, permet de défléchir le flux d’air vertical, allant du haut vers
le bas, provenant des rotors, soit vers la gauche, soit vers la droite (voir
schéma ci-dessous).
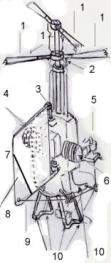
Figure 2 : Explications : 1) voiture
tournante contra-rotatives, avec 4 pales d’hélicoptère ou d’autogire en
carbone, dural ou composite, 2) tête de rotor (au milieu) contrarotative
(coaxiale), avec son frein, 3à charnière pour la dérive, 4) volet vertical
directionnel (la dérive), 5) 2 manettes sur le tableau de bord, l’une pour le
rotor (le collecteur) et son inclinaison, l’autre pour l’orientation bâbord (G)
et tribord (D) de la dérive, 6) le moteur, 7) charnière pour le volet
complémentaire de la dérive (8), 8) volet complémentaire de la dérive orientant
le flux d’air vertical provenant du rotor, orientation, selon son inclinaison
(G ou D), l’air à gauche ou à droite (ce qui permet de tourner dans le plan
vertical et de contrer tout effet de couple ou « d’auto rotation » _
dans le sens giration sans fin sur son axe vertical comme une toupie) _ voir
son rôle dans la figure 3. 9) fils en nylon ou carbones, pour la commande de la
dérive et aileron. 10) trépied. 11) sac à dos souple (en toile de parapente),
placé dans le dos de la sellette, pour transporter des affaires.
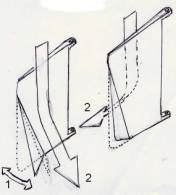
Figure 3 : Explications :rôle de ce volet
additionnel sur le flux d’air venant du roto : 1) latitude de déplacement
et d’orientation de ce volet additionnel, 2) orientation du flux d’air venant
du rotor, selon l’orientation du volet additionnel. Le tableau de bord est semblable à celui décrit dans la solution
n°1 (autogire).
11 Une estimation approximative de son budget
Nous proposons un budget, sur la base s’un scénario minimum
budgétaire, à l’économie, du moins au départ.
Nous imaginons d’abord de construire une version
contra-rotative, avec tête de rotor plaçant les pales très haut à 2, 5 mètres
du sol (en position strictement verticale de l’engin posé sur un sol
parfaitement horizontal, pour éviter que les pales puissent toucher le sol et
casser, lors de leur rotation ou de décapiter quelqu’un), des pales de 3 mètres
de long, un réducteur à courroie / ruban (celui du Aircooter II) tournant
rapidement, avec un moteur 65 Hp (Rotax 582 UL DCDI 65CV). On
peut régulièrement trouver ce moteur (très solide) en occasion à moins de 200
h. Notre version serait une tournant vite (pale et réducteur tournant vite).
Dans le cas où cette rapidité de rotation augmenterait le moment d’inertie,
donc l’effet gyroscopique et donc diminuerait la manœuvrabilité, alors nous prévoirions alors une seconde
version avec pales de 5 mètres de long et réducteur moins rapide (d’un diamètre
>).
Sans le pot d’échappement acier (qui pèse, quand même, 5,1
kg !), nous avons un moteur à 36,7 kg. Il faudra alors fabriquer
soit même une série de pots d’échappement en Dural « jetable », dans
un banc de soudage aluminium (sous atmosphère d’argon), avec un poids qui ne
doit pas dépasser 2 kg. Normalement notre réducteur B pèse 4,5 kg, avec un
réducteur à courroie, peut-être obtiendrions un poids pour ce dernier de 3 kg.
Chaque pale en carbone devrait peser 3 à 4 kg maximum chacune (~ 12 à 16 kg).
Le démonstrateur sera lourd, au mini : 56,7 à 60 kg nu.
|
Poste |
Budget (Euro) |
Poids (Kg) |
Commentaires |
|
Rotax 582 UL |
3760 |
36,7 (sans pot échappement) |
D’occasion (< 200 h, idéal 50 à 100 h). A démarrage
manuel |
|
Tête de rotor |
7520 |
3 à 5 |
A commander chez KAMOV (ou Airscooter ou Gyrodyne). Elle
doit résister à un facteur de charge minimum de 5 G, soit 150 kg x 5 = 750 kg
(on la calculera pour 1 tonne de charge). |
|
Pales composites x 4 |
6015 |
12 |
|
|
Ailerons en composites |
600 |
1 |
|
|
Sellette, réservoir, cadre dural, airbag, pot échappement
alu, divers, assurances ( ?) … |
3000 |
2 |
Il ne sera peut-être facile d’assurer l’engin et le pilote
(sinon, en tout cas une assurance RC, au minimum). |
|
Etudes techniques pour le calcul de la tête du rotor, du
moment, de la poussée, des pales … |
De 0 à 15000 ou + |
|
Cela dépend si on trouve un ingénieur hélicoptériste
passionné voulant s’associer ou non au projet (sinon faire réaliser cette
étude chez Kamov). |
|
Pilotage pour essais |
De 0 à 7500 |
|
Soit trouver un pilote d’hélicoptère (si possible
connaissant les hélicoptères coaxiaux) prêt à faire les essais gratuitement
(par ex. un pilote passionné voulant s’associer ou non au projet). Soit
l’auteur du projet se forme au pilotage hélicoptère chez Kamov (par exemple.
Cours en anglais). |
|
TOTAL |
De 20895 à 35895 € (238701,75 FF) |
56,7 kg (avec ~ 10 litres d’essence 2 T : ~ 65 kg). |
1) avec pilotage mais sans les études techniques: 28394,4
euros 2) avec pilotage et avec les études techniques: 35895
euros. |
Notes : C’est un budget a minima (pour l’atteinte et
compresser au maximum les dépenses, on choisira sûrement alors des solutions de
bric et de broc, en faisant appel au maximum au bricolage et système D) .
La solution sera lourde : 56,7 kg à nu et avec l’essence
entre 65 kg à 70 kg.
Dans ce budget, on ne tient pas compte du budget essence,
huile (entretien) plus faibles que les autres postes.
Avec un moteur Hirth 2703 (2 temps) moins puissant (55hp), de Poids
75 lbs (34,02 kg), on aussi un prix moins élevé : Prix $3496,00 US.
Pour information
: On ferait les tests sur un plan d’eau, au départ (avec gilet de
sauvetage).
12 Son financement
Les idées ne manqueraient pas, pour son financement :
Ø Faire un
site web et faire un appel au dons ( ?).
Ø L’armée,
dont la DGA Boulevard Victor (cela ne risque-il pas de restreindre la diffusion
de l’engin ( ?) …).
Ø Des
constructeurs de drones _ SAGEM, Thomson … ?.
Ø EADS -
Eurocopter ?
Ø Une
souscription populaire (pour que l’appareil soit aussi vite que possible
populaire).
Autre idée : contacter tous les avionneurs et hélicoptéristes, lors des salons aéronautiques du Bourget, en France, le salon de Dubaï et d’autres salons en Angleterre, USA, Chine, Japon, Allemagne etc. …
Précautions : nécessité que le dossier technique de présentation, soit précis,
réaliste, crédible, chiffré
(voir le chapitre 10
« Annexe : dossiers à constituer » de ce document).
Sinon, la dernière solution est de créer une association
1901, de soutien au projet (regroupant
les « fans », mécènes etc. … du projet). Le financement du
projet proviendrait alors essentiellement des adhésions et dons (une
initiative, cette fois-ci, plus dans un esprit « paramoteur »).
Voici une liste d’éventuelles sociétés
(« sponsors ») à solliciter :
|
|
|
Hélicoptères à turbine(s) |
|
Constructeurs |
Part
de marché % |
Adresse |
|
Agusta |
5.2 |
AGUSTA : http://www.agusta.com/
EHI : Elicotteri Helicopter Industries Ltd
(Agusta - Westland). Et Agusta-Westland |
|
Bell |
40.6 |
|
|
Enstrom |
2.2 |
Enstrom Helicopter Corporation,
U.S.A., P.O. Box 490, 2209 22nd
Street, Menominee, Michigan 49858,
Located on the Menominee-Marinette Twin County Airport (MNM), Phone:
906-863-1200 Fax:
906-863-6821, http://www.enstromhelicopter.com/
|
|
Eurocopter |
39.5 |
EUROCOPTER : http://www.eurocopter.com/site/FO/scripts/siteFO_accueil.php?lang=EN
2 à 20, avenue Marcel-Cachin - BP 109 93123 La Courneuve
Cedex France, Phone : +33 (0)1 49 34 45 00 / Fax : +33 (0)1 49 34 45 30 |
|
Kaman |
0.4 |
Kaman Corporation, 1332
Blue Hills Avenue, Bloomfield, CT 06002-0001. Tél. : (860) 243-7100 http://www.kaman.com/index.php |
|
Kawasaki |
1.4 |
KAWASAKI motors, http://www.kawasaki.com/
(pour mention, turbine à gaz Kawasaki : http://www.kawasakigasturbines.com/home/
) |
|
MD Helicopters |
6.3 |
MD Helicopters Inc., 4555
East McDowell Road, Mesa, AZ 85215,
Usa, sales@mdhelicopters.com ,
Tél.: (480) 346-6344, Fax: (480) 346-6339, USA http://www.mdhelicopters.com/ |
|
PZL-Swidnik |
0.6 |
PZL-Swidnik,Wytwórnia Sprzętu Komunikacyjnego
„PZL-Świdnik” Spółka Akcyjna, Aleja Lotników Polskich 1, 21-045
Świdnik, Poland Tel.: +48 (81) 4680901, 7512071, Fax: +48 (81) 4680919, 7512173 Mr Jan MAZUR jan.mazur@pzl.swidnik.pl , http://www.pzl.swidnik.pl/ |
|
Schweizer |
0.6 |
|
|
Sikorsky |
3.2 |
SIKORSKY Aircraft Corporation, based in Stratford,
Connect., USA Tél.: 1-800-946-4337 www.sikorsky.com Solution
contrarotative : Contact: Ed Steadham,
Tel.:
203-386-7143, Gsm: 203-209-5170, esteadham@sikorsky.com |
|
Kamov |
? |
KAMOV : http://www.kamov.ru (voir adresse en annexe). |
|
HAL |
? |
HAL - Hindustan Aeronautics
Ltd. (Inde), Helicopter Division, PB No 1790, Vimanapura Post,
Bangalore – 560 017, INDIA, Ph: 080-25231542, 25221750, Fax: 080-25223096,25231580,
e-mail: rwaengg@vsnl.net , rotorops@vsnl.com , site : www.hal-india.com/ (HAL
construit sous licence des hélicoptères et avions français et produit les
modèles civils et militaires “Dhruv Advanced Light Helicopter (ALH) ” :
PT1, PT2, PTA, PTN …) |
|
Gyrodyne |
confidentiel |
GYRODYNE ( ?) : (voir adresse en annexe. Cette société a
peut-être cessé d’exister ( ?) http://www.gyrodynehelicopters.com
). |
|
NH Industries |
? |
NH Industries : http://www.nhindustries.com/
consortium compose de EUROCOPTER
(France/Germany) 62.50%, AGUSTA (Italy) 32.00%,
STORK FOKKER Aerospace B.V. (The Netherlands) 5.50%. |
|
Boing |
/ |
BOING: http://www.boeing.com/ Boing a
unprojet de hélicoptère voiture http://www.cbsnews.com/stories/2004/08/30/tech/main639396.shtml |
|
Denel |
? |
DENEL (Afrique du Sud) : http://www.denel.co.za/ Denel's physical address:
Denel (Pty) Ltd, (Reg No 1992/001337/07) Denel Building, Jochemus
Street, Erasmuskloof, Pretoria Denel's postal address: PO
Box 8322, Centurion 0046, South
Africa Contact Numbers: Tel: +27
12 428 0658, Fax: +27 12 428 0651 |
|
|
|
|
|
|
|
Hélicoptères à moteur à
pistons |
|
Constructeurs |
Part de marché % |
Adresse |
|
Enstrom |
1 |
Voir plus haut
: http://www.enstromhelicopter.com/
|
|
Robinson |
85.4 |
ROBINSON HELICOPTER, 2901
Airport Drive,Torrance, California 90505 USA Tel.: (310) 539-0508, Fax: (310)
539-5198, |
|
Schweizer / Kawada |
12.9 |
Voir plus haut
: http://www.schweizer-aircraft.com/ |
|
|
|
|
|
Divers |
0.7 |
|
|
Airscooter |
|
|
|
Dragonfly |
|
Hélicoptère ULM
: |
|
Yoshine |
|
Yoshine http://yoshine.com/home.php Modèle
: EzyCopter |
|
Helisport |
|
Helisport srl, St.da Traforo del Pino 102,
10132 TORINO (IT), Tel: +39 011 899.67.30, Fax: +39 011 899.5550, modèle :
CH-7 Hélico. http://www.ch-7helicopter.com/ , kompress@tin.it
(hélico à 50000 €). |
|
Ultrasport |
|
American Sportscopter
International Inc., P.O. BOX 14608,
Hanger 21A, Newport News/ Williamsburg airport, Newport News, VA 23608, USA, Tel:+1-757-872-8778,
Fax:+1-757-872-8771, e-mail: asii@asiicopter.com
, http://www.ultrasport.rotor.com/ hélico. En kit. |
Tableau 1 : liste des hélicoptéristes du monde entier, tiré de la source : http://www.aviation-fr.info/helicos/page1.php
Autres pistes :
Ø
Le Ministère de la Recherche : www.recherche.gouv.fr
Ø
Aéroclubs de France : www.aeroclub.com
Ø
L’ONERA (Office National d'Études et de Recherches
Aérospatiales) : http://www.onera.fr/
Ø
Délégation générale pour l'armement, D.G.A Site Victor, 8 bd Victor 75015 PARIS, Fax : 01 45 54 06
89 : www.defense.gouv.fr/dga/
Ø
Ministère de la Défense, état major de la marine, 2 r Royale 75008
PARIS, 01 42 92 10 00.
Ø
Ministère de la Défense, état major de l'armée de l'air, 26 bd Victor
75015 PARIS
Pour réduire les coûts, certaines parties de l’hélicoptère pourraient
être étudiées et réalisées dans le cadre d’un projet d’étude ou de fin d’étude
d’une école technique ou d’une école d’ingénieur.
13 La sécurité, l’immatriculation et l’homologation
13.1 Dispositifs de sécurité sur cet autogire ou hélicoptère autonome
Différents dispositifs seraient prévus :
1)
Contre la panne : un filtre pour l’essence, un filtre
pour l’huile, un pour l’air …
2)
Contre le risque de décapitation du public à proximité. Tête
du rotor située très haut (à plus de 2 m de hauteur), L’autogire doit toujours
décoller sur son trépied. Son trépied doit être toujours posé sur un sol dur,
parfaitement horizontal (l’autogire doit être strictement vertical au
décollage). Les pales sont visibles et très colorées.
3)
En cas de panne moteur à « haute altitude » (~ 10
m), possibilité : a) d’arrêter immédiatement le moteur (coupe circuit sur
la manette à gaz, et démarrage électrique), b) freinage immédiat de la rotation
des pales (possible seulement si le moteur est arrêté _ une sécurité doit être
prévue pour que la rotation des pales ne peut pas être freiné si le moteur est
en marche), d) déclenchement d’un parachute pyrotechnique et de l’airbag (le
déclenchement du parachute pyrotechnique n’est possible que si la rotation des
pales est totalement arrêtée _ une sécurité doit être prévue dans ce sens). Une
poignée unique de secours (couleur rouge, située sous le siège) déclencherait
le tout (dans l’ordre de déclenchement défini ci-avant).
4)
Pour le siège, il y aurait une ceinture de sécurité 3 points
(par 3 clics, boutons pression rouges).
5)
Contre la panne d’essence : un réservoir principal et
de secours (réserve) totalement transparent (un tuyau montrant le niveau d’essence + plus une jauge électrique + une
alarme sont prévus sur le tableau de bord).
6)
Le bout des pales du rotor et de l’hélice propulsive serait
peint d’une bande rouge vermillon à l’extérieur et d’une bande jaune d’or.
Toutes les éléments dangereux de l’autogire seraient peint en rouge vermillon,
avec un autocollant triangulaire jaune signalant un danger.
7)
Chaque élément à démontage rapide (vis, écrous …) sera
signal d’une couleur vive (rouge).
 risque incendie
risque incendie  risque électrique
risque électrique  chute de hauteur[13]
(!)
chute de hauteur[13]
(!)
L’idée de combiner frein du rotor et de parachute
pyrotechnique est peut-être fort délicat à envisager.
Mais, par contre, tous les cas, il y a aura un airbag situé
sous le siège, pour prévenir les chutes de faibles hauteur, et afin que si le
pilote et l’appareil chutent dans l’eau, ils ne coulent pas.
Comme cet aéronef peut ne pas se distinguer sur le fond du
ciel bleu (en cas de fort soleil ou de soleil de face), en raison de sa
petitesse, afin qu’il soit vu des autres aéronefs (et afin d’éviter toute
collision / abordage dans le ciel), l’appareil serait très coloré, y compris
ses pales (voire, il sera peint avec des teintes fluos et voire un damier de
couleur sur les ailerons). Des balises-flashes clignotants (type flashes avions
en vol ou lampes stroboscopiques ?) permettent à l’aéronef d’être repéré
en vol, par les autres avions (il pourrait aussi avoir de minuscules flashes,
en bout de pales. Ces derniers pourraient être alimentées par un une
« micro-hélice » placée dans un venturi, comme celle des anémomètres
de poches des parapentistes, situés en bout de pales … juste une suggestion
( ?)).
Suggestions : voler avec un casque
anti-bruit (en fait, un casque anti-bruit Intercom). Et pour les premiers
essais, voler éventuellement avec une combinaison ignifuge.
Note : on pourrait encore imaginer sur la tableau de bord, un commutateur pour mettre en marche la balise lumineuse anti-collision et un bouton pour mettre en marche une alarme type, alarme de recul d’engin de chantier (si poids très faible) ou bien à côté du pilote (à sa G ou à sa D), une bombe sirène d’alarme, telle que celle employées par les supporters lors des grands matches de footbaal.
13.2 La pratique
La pratique de l'autogire nécessite une bonne formation, car
même s'il s'agit de l'aéronef le plus simple et le plus facile à piloter,
certains gestes sont à éviter.
Les vols s’effectueraient à faible vitesse (maximum 60 km/h)
et à faible altitude (toujours, à faible altitude). Le décollage doit être
doux. On décolle, l’autogire posé sur son trépied, sur une sol dur et
horizontal.
Révision maximum constante de l’autogyre (essence de bonne
qualité, huile de synthèse pour haute température (moto de compétition) pour le
moteur 2 temps. Vérification, visite prévol à chaque fois, remplacement
immédiat des pièces en cas de doute. Remplacement régulier des filtres.

Pour
éviter cela … une bonne formation au pilotage autogire
(Photos
provenant de l’Autogire club de Mimizan).
13.3 le tableau de bord

Exemples d’instruments qu’on pourrait trouver sur le tableau
de bord :
a) jauge essence (avec alarme sonore et visuelle), b)
température moteur, c) alarme niveau d’huile, d) compte-tour
moteur, e) compte-tour rotor, f) un niveau à bulle, pour
vérifier la verticalité de l’ensemble avant le décollage,
g) variomètre, h) altimètre,
i) compas, [ j) badin (?), k) la bille ( ?), (k) GPS ?) … ].
A côté de ce tableau de bord, et de chaque côté du pilote, il y aurait 2 manettes, l’une pour l’inclinaison de la tête de rotor (commande de « collectif »), l’autre pour l’orientation gauche-droite, des volets de direction (métallique ou en composite) et pour le « cyclique », situés à l’arrière de l’appareil. Les manettes pourraient ressembler à celles de l’engin volant « Jetpack » (voir plus haut dans les rappels historiques). « L’anti-couple » se commanderait au niveau des cuisses (en fonction de leur inclinaison ou de leur pression sur un « palpeur »)
Sur les côtés, près des pieds, il y aurait des niveaux à
bulles (à voir).
13.4 L’homologation
Tout engin motorisé doit être homologué (par le service des
mines, en France). Il y a plusieurs critères d’homologation dont bien sûr, le
principal, est la sécurité. Il faut que les pièces résistent aux efforts (et si
possible que tout soit calculé avant au niveau résistance des matériaux et
contrainte) et à la fatigue.
Un dossier technique précis, détaillé, à ce sujet doit être
fourni à l’administration d’homologation concernée.
Note : une homologation, selon
certaines sources, pourrait coûter cher (à vérifier).
13.5 L’immatriculation
En France (en tout cas), tout engin volant motorisé doit
être immatriculer (et si possible avec une immatriculation bien visible). On
pourrait mettre l’immatriculation sur les volets directionnels (type dérive) ou
voire (aussi) dans le dos du pilote.
14 En conclusion provisoire
Le premier problème sera le poids minimum du
moteur nécessaire pour faire décoller l’appareil et son pilote. Si le poids de
l’appareil est au delà de 35 kg, cela devient moins intéressant.
Pour réduire, ce problème, il faut faire la chasse au moindre poids (ou
grammes). Par exemple, pas de démarreur électrique (une batterie lithium-ion ou
rien). Pré lançage à la main (mais cela ne pourrait marcher que si l’on choisit
la solution non contra-rotorique avec un seul rotor). Et on embrayerait
l’hélice du rotor, que si le moteur est bien lancé et chaud.
14.1 Concernant la solution « paramotogire » :
Le problème est que la poussée de l’hélice
propulsive empêchera normalement de se poser totalement verticalement comme
pour un hélicoptère. Et il peut y avoir le risque de basculement de l’engin,
vers l’avant, à l’atterrissage, dès
qu’on touche le sol (il y a le risque que les pales touchent terre et soient
détruite). Comment résoudre ce problème. Faut-il au lieu d’un trépied, un train
d’atterrissage à 3 ou 4 roues (mais plus lourd, et on reviendrait presque au
concept du chariot) ?
14.2 Concernant la solution contra-rotative « scoot-air » :
Il faudrait pouvoir construire une tête de rotors
contrarotatif, simple ( ?) et surtout légère (peut-être tout en carbone).
Avantage :
Par cette solution, on gagne en poids (plus de queue pour
cet hélicoptère, plus de rotor de queue ou de stator).
Inconvénients :
a) Les hélicoptères coaxiaux ont montré une commande directionnelle faible, dans les forces vers l'avant, avec les commande de vol et de lacet renversées, pendant les « autorotations ».
b) la méthode de commande d'axe de lacet est différente
entre les deux types d’hélicoptères (simples rotors et rotors contra-rotatifs).
Le pilote d’hélicoptère classique simple rotor, doit alors changer radicalement
ses habitudes.
c) Les lames (les pales) du rotor principal doivent être
rigides pour les empêcher de rentrer en contact (contact qui aurait un effet
destructeur catastrophique, entre les 2 jeux de pales, générateurs de risques
mortels).
Un « scoot-air » ultra-léger devraient alors certainement
être conduit avec beaucoup de douceur ( ?).
D’un autre côté, des spécialistes des hélicoptères sentent
intuitivement que ce type d’engin aurait une manœuvrabilité exceptionnelle.
14.3 En résumé
Le risque est que le poids de l’ensemble atteigne entre 30 à 50 kg à vide. D’où la raison du trépied ...
justement à cause du poids de l'ensemble. En tout cas, pour réduire le poids,
il faudrait construire tout en carbone et « grignoter chaque gramme »
(sans rogner bien sûr sur la sécurité).
En fait si l’on regarde la
documentation complémentaire ci-jointe (+), toutes les solutions se révèlent
plus compliqués qu’il n’y paraît (il ne semble pas qu’il y ait de solution
« hyper simple », comme l’imaginait André Franquin, avec son « Fantacoptère » en 1952).
Car le décollage vertical pur, style
hélicoptère, ... en autogire, n'est pas évident. Il faudrait peut-être courir.
Et pour ce qui est de la solution hélicoptère
contra-rotatif, la tête de rotor est complexe a fabriquée (et si
l’on veut la rendre simple à construire, n’y a t-il pas alors, dans ce cas, un
risque pour la sécurité ?).
Notes : Sur les bénéfices de la solution rotors
coaxiaux : http://www.gyrodynehelicopters.com/coaxial_benefits.htm
Sur les calculs pour la voilure contra-rotative : http://www.kamov.ru/market/encycl/coahe.htm
En
conclusion (finale provisoire), selon cette étude et son auteur (et en particulier avec l’étude
de l’annexe « 18. Annexe : estimation de la puissance
mini pour faire décoller un homme de 100 kg »), ce projet de
réalisation de "fantacoptère / scoot-air" (dans le cadre du projet
« Libellule ») apparaît parfaitement faisable / réalisable, avec la technologie actuelle
(en particulier avec la technologie des constructeurs Airscooter et Kamov).
Comme le suggère notre étude (et le chapitre 18),
et atteindre pleinement les objectifs du cahier des charges, il nous
faudrait trouver ou dessiner et réaliser alors un moteur 4 temps,
type AeroTwin, de 40 Ch/Cv (et de 26 – 27 kg à vide) _ ce qui
demande de miniaturiser encore plus un moteur 4 temps _… moteur qui n’existe
pas encore sur le marché.
Sinon personnellement, l’auteur penche plus
pour une solution « contra-rotative » qu’une solution
« autogire », à cause de son meilleurs rendement, sa meilleure
manœuvrabilité et cela malgré sa plus grande complexité.
14.4 En conclusion (de cette conclusion provisoire)
Nous orienterons le début de la conception et réalisation de
notre engin, vers une solution hélicoptère coaxial (à pales contra-rotatives), « sac à dos »,
avec un moteur thermique unique (type Rotax 503 ou Hirth 7203, inférieur à 30
kg, 40 Cv) avec réducteur, et réservoir derrière le siège du pilote, avec un
système électrique, de contrôle de lacet (et anti-couple) simple sur le modèle
du GEN-H-4, un rotor coaxial à pas variable (type Ka-56).
L’engin serait posé sur le sol, au décollage et le pilote
légèrement assis. La tige transmettant la force au rotor puis aux pales
seraient « légèrement longue » pour placer assez haut les pales
au-dessus de la tête du pilote.
Une certaine distance entre les pales du bas et celles du
haut ainsi que leur conception en Kevlar-Carbone, pour plus de rigidité,
permettrait d’éviter, dans certaines configuration de vol, le risque de
collision (souvent mortel) entre le jeux de pales du haut et jeux de pales du
bas.
Il faut imaginer un système (amortisseurs) de limitation des vibrations en particulier dans les
tiges transmettant la force au rotor. Il faut qu’elles soient calculées pour
résister aux plus grands facteurs G possibles.
Partie
en construction ![]() .
.


Sources :
http://www.yoshine.com.tw/e-yx24.htm


Exemples
de têtes de rotor d’hélicoptères contra-rotoriques [14]
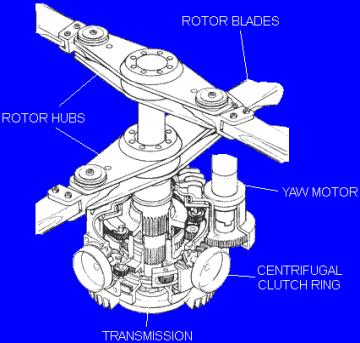
(Kamov).
|
|
Description (en anglais avec sa traduction
française) : 1.Upper
rotor hub (Fr : Moyeu
supérieur de rotor) de
rotor) de pas). 12,13. Rods (Fr : Tiges) 14,15. Clamp
(Fr : Bride)
de plateau oscillant) 17. 17. Connection
ring (Fr : Anneau de
raccordement)
de pilotage ?)
plateau oscillant) |
Figure
4 : Tête d’hélicoptère KAMOV (Russie).
15 Adresses, sociétés ou personnes à contacter pour ce projet
15.1 Adresses pour la solution « autogire » « paramotogire »
1)
Autogire-Club, MARTINS Olimpio, 23 rue des 3 pignes, 40200 mimizan.
gyro.club@laposte.net et christophe.martins@laposte.net
0892.68.18.30. code : 635 (35 centime d’euros la minute).
Site :
http://autogyre.free.fr/
2) ADVENTURE
S.A. (Fr), parking Porte de la Villette, Boulevard de la Commanderie, 75019
PARIS (France), Téléphone et Télécopie Tel: 33 (0)1.48.34.74.00, Fax: 33
(0)1.48.34.76.24,
E-Mail : info@adventure.fr
Jours et
heures d'ouverture au public : Du lundi au vendredi, de 9 h à 12 h 30 et de 14 h à
18 h
S’y
rendre :
depuis la porte de la Villette, prendre à gauche le boulevard de la Commanderie
entrer dans
le parking du centre commercial Casino, prendre la rampe d'accès jusqu'au
premier niveau suivre le fléchage Adventure (Coordonnées GPS : 48N5420 /
002E2408).
Site :
http://www.paramoteur.com/fr/index.htm
Suggestion : contacter Guy LEON-DUFOUR, Président d' ADVENTURE S.A.

Note : Pour son paramoteur
Adventure F3 (pour poids pilote ~85 kg, selon la voile choisie), Adventure a
choisi le moteur Solo 210 (mono cylindre, 2 temps, entre 11 cv et 14.5 cv,
poussée statique : 34 kg), avec allumage digital à correction d'avance,
démarreur électrique, batterie se charge en vol. Autonomie : 3 heures
(réservoir de 10 l)
Poids à vide de l’ensemble paramoteur : 20 kg / 44 Lbs.
On peut supposer que pour une version hélicoptère, il faudra plus de puissance,
donc plus de poids (et donc plus de carburant transporté, ce qui contribue
encore au poids).
3) APPULMA
(Fr), l'association des PULMA et ULM légers, Association pour la Promotion des
Planeurs Ultra-Légers à Motorisation Auxiliaire, Régis Cottet, président, http://www.appulma.asso.fr/ ,
mail : info@appulma.asso.fr
(Déjà 22 Mosquito commandés en groupement d'achat).
15.2 Adresses pour la solution « hélicoptère contrarotatif » « scoot-air »
a) Hélicoptéristes :
6) AIRSCOOTER (Us), dont son AirScooter II Ultralight
Vehicle, E-mail: info@airscooter.com ,
Site: www.airscooter.com , voir aussi
sur ce site, la page : http://www.airscooter.com/pages/airscooter_main.htm
7) GYRODYNE (Us),
Gyrodyne Helicopter Historical Foundation, P.O. Box 3838, Reno, Nevada USA
89505, Email : Gyrodyne_History@Yahoo.com et leur site : http://www.gyrodynehelicopters.com
8) KAMOV (Russie), "Kamov-Holding", 11,
Yunosti, 1, 111395, Russia, Moscow, +7(095) 788-87-97,
Tel/fax: +7(095) 788-87-99, e-mail : market@kamov.ru
"Kamov", 8a, the 8
March str., Lubertsy, 140007 Russia, Moscow region, +7(095) 788-87-97 171.37.43,
Tel/fax: +7(095) 700-30-71
e-mail : kb@kamov.ru , Site : http://www.kamov.ru
9) HILLER Aircraft
Corporation, 3200 Imjin Road, Marina, California 93933-5101
Tel: (831)384-4500 Fax: (831)384-3100, http://www.hilleraircraft.com/
[10) The Yoshine Helicopter Company (compagnie
d’hélicoptère chinoise de Taïwan ) :
Website (Chinese / chinoise):
http://ww.yoshine.com.tw Website (English
/ Anglais): http://www.ezycopter.com ]
c) Motoristes (moteurs 2 ou 4 temps) :
1) AEROTWIN : Le AIRSCOOTER II utilise un moteur
AeroTwin 65 HP à 4200 RPM. Poids
: 95 lbs / 43 kg,
Site : http://www.aerotwinmotors.com/
, e-mail : info@aerotwinmotors.com
(adresse d’Airscooter).
Moteurs dessinés et développés par Bill White de Nouvelle Zélande.



MoteurAeroTwin
65 HP à 4200 RPM, 4 temps (4 Stroke), 2 cylindres en lignes. Poids : 95 lbs / 43 kg prêt à
l’emploi (nécessite de l’essence d’indice d’octane minium 91UL), http://www.aerotwinmotors.com/pages/at_specs.htm
Son
prix est de $6,500 US.
2) A V I R E X s.a.r.l., DISTRIBUTEUR ROTAX®
FRANCE, AERODROME DE DREUX
28500 VERNOUILLET – France, TEL : 02.37.42.30.09. FAX :
02.37.46.26.86. http://www.avirex.fr/,
et www.rotax-aircraft-engines.com
(Autriche et Canada).
Exemples : Modèle 447 UL - 1V (2 temps) :
29,5 kW / 39,6 hp @ 6500 1/min(rpm), 29 kg.
Modèle 503 UL - 1V (2 temps) : 34,0 kW / 45,6
hp @ 6500 1/min(rpm), 31,7 Kg.
Modèle Rotax 912 (4 temps, 80 hp) or the Rotax
912S (4 temps, 100 hp), Rotax 912 UL DCDI (puissance maximal soutenue : 79CV / 58.9KW @ 5500 RPM, 121.2lbs
/ 55.0Kg) Sources : http://www.ultralightnews.ca/rotax503/rotax2strokepdf/UL_017_94.pdf
http://www.piecesrotax.com/moteurs_rotax/rotax_912.htm
(Les moteurs 2 temps utilisent de l’essence 2 temps, mélange
d’essence ordinaire avec 5% d’huile de synthèse).
(Note : poids d’un Rotax de 29 Kg (39,6 Hp) à 55 kg (79
Hp)).
3) SARL JPX (Fr), rue de l'Artisanat, Z.I. Nord 72320
VIBRAYE, mail : richard.piras@groupe-mecachrome.com
, http://www.jpx.fr/ (Moteur de paramoteur : D160-D330).
JPX est situé à 10 minutes de l'autoroute A11 Paris - Le
Mans (sortie La Ferté-Bernard) à 165 km de Paris et 45 km du Mans.
Moteur
D330 de JPX.
4) SOLO (Allemagne) :
Suggestion :trouver les coordonnées du fournisseur ou du fabriquant du moteur Solo (fabriquant allemand).
5)
Göbler-Hirthmotoren KG (Allemagne) : Max-Eyth-Str. 10,
D-71726 Benningen Tel.: 07144-8551-0, Fax: 07144-5415, e-mail: info@hirth-engines.de , www.hirth-uavengines.de ,
docs : http://www.ultralightnews.com/hirth2703/ , http://www.recpower.com/2703.htm
a) Hirth HM 504 A-2 : 105k , 77 kW
/ 56,66 CH,
b) moteur 211 R4E …
c) Hirth 2703 (2 temps), 55hp @
6200rpm (couple: 49ft/lbs @ 5600rpm)
Vers Carb dual, démarreur manuel (Recoil Start). Prix $3496,00.
Poids: 75
lbs / 34,02 kg. Livré-ventilateur-radiateur comprenant le démarreur électrique et
échappement : 81 lbs / 36,74 kg.
La boîte de vitesse facultative ajoute 19 livres (8,61 kg).
d) Hirth 2706 (et son
évolution : le Hirth 3203) : 65 hp, 33,11 kg à 35,8 kg.
6) HKS Aviation (Japon) : http://www.hks-power.co.jp/hks_aviation/english.htm , voir aussi http://www.hks700e.com/
Moteur HKS700e : Puissance: 56hp à 5800 t/mn, 60hp à 6200 t/mn / Couple maximum :
7 kgm à 5000rpm (50,6 Ft/Lbs à 5000rpm). T/MN maximum: 6200 rpm /
Pistons : anneaux de piston enduits de PVD / Cylindres :
enduits d’un composé Nickel – céramique / Sens de rotation: sens
contraire des aiguilles d'une montre (en regardant du siège du pilote, la
configuration du moteur) / Consommation de carburant : Approximativement 9 litres/heure à 4750 t/mn
(~ 2,38 gallons/heure) / Démarreur:
Seulement Électrique / Réducteur
(boîte) : Intégré avec L'absorbeur
de chocs de torsion / TBO : 800 heures (attendez un plus haut TBO selon
expérience vol) / Poids:
Moteur: nu, avec tout
l'appareillage électrique, le démarreur électrique, les carburateurs et la
boîte de vitesse: 49,1 kg / 108
livres(lbs). Echappement: 3,2 kg / 7 lbs., réservoirs d'huile et
refroidisseur: 2,7 kg / 6 lbs / totaux
: 55,0 kg / 121 lbs /
boîte de réduction: "A"Box
avec le rapport: 2,58 "boîte de
B" avec le rapport: 3,47
Cylinders: Nickel Ceramic Composite
Coated Cylinders
Pistons: PVD Coated Piston Rings
d) Micro-turbines (à gaz) :
Microturbo : 8, Chemin du Pont-de-Rupé - BP 2089 - 31019 Toulouse Cedex
Téléphone : +33 (0)5.61.37.55.00 / Télécopie : +33 (0)5.61.37.10.79.
Microturbo développe et vend : a)
un turbo-réacteur TRS18, b) un moteur de drone ( ?) TRI60. Il
développerait une future micro-turbine poids < 40 kg.
http://www.turbomeca.com/public/fr/societe/fiche_microturbo.php
(voir Bettina FREY, Tél. : +33 (0)5 59 12 55 69, E-mail: bettina.frey@turbomeca.fr, Site : www.turbomeca.fr
).
Turboréacteur "Daemon" (Démon) : caractéristiques : Longueur
(générale) : 15,7 po / 40 cm; Diamètre: 5,5 po / 14
cm(coque moteur), 8,5 po / 21,6 cm (monture); Poids (total): 15 livres / 6,8
kg; Vitesse de turbine: 49.000 t/mn; Puissance (axe):
30 Hp; Poussée à vitesse
optimale : environ 25 livres / 11,3
Kg; Carburants: kérosène, essence, alcool; Consommation de carburant: environ 4,5
gals/hr - 17 litres/h (conso. énorme); Matériaux
(principaux): acier inoxydable et aluminium. Site : http://www.windspire.com/daemon/ & http://www.vortechonline.com/jets/
Tel.:410-663-8023,
Fax:410-668-8518, Winspire Inc.,PO Box 145, Long Green, MD 21092, USA.
Plans (de construction) : $25.95 Us + $8 Us (de port hors Usa). Monté, complet : $3,995.00 ($65 de port).
Note / pour info : . Gas Turbine Laboratory (GTL) of the Massachusetts Institute of
Technology : http://web.mit.edu/aeroastro/www/labs/GTL/
. GT China
réalise des micro-turbine à gaz : postmaster@gt-china.net, www.gt-china.net
c) Miniaturiste :
1) Le site HobbyZone
propose 2 hélicoptères, modèles réduits, nommés E-flite RTF (modèlesCP et CX)
contra-rotatifs électriques (« Blade CP & CX RTF Electric Micro
Helicopter »), sur leur site :
http://www.hobbyzone.com/rc_helicopters_e-flite_blade.htm
Note : cet hélicoptère, à propulsion électrique, est
aussi vendu, au prix de 255 euros TTC, par :
EOL (EOL'INTERNATIONAL HOBBY - Modélisme-
-Radiocommande), 3 r du Louvre 75001 Paris, tél. : 01 43 54 01 43,
Mail : eolparis@eolhobby.com , site :
http://www.eolhobby.com/


Spécialistes des la propulsions contra-rotorique :
1) Virginie Guerber, Ingénieur Software à EADS Dornier
Fiedrichshafen, Allemagne (Germany), e-mail : virginie.guerber@dornier.eads.net,
diplômée de l’Ecole Nationale Supérieure de Physique
de Strasbourg
publication : Flight control design for a coaxial
helicopter.
Optimisation through the
H-inf Method, comparison with traditional control, simulation through
Matlab/Simulink.
(La conception du contrôle de vol pour un hélicoptère
coaxial.
Optimisation par la Méthode H-inf, comparaison avec contrôle
traditionnel, simulation par Matlab/Simulink).
Source : http://control.ee.ethz.ch/index.cgi?page=seminars&action=details&id=161
2) Pat durand : e-email : p.durand@att.net
http://www.verticalreference.com/articles/publish/article_31.shtml
(www.centennialofflight.gov/essay/Dictionary/heli_rotor_config/DI54.htm
).
15.3 Fabricants de pièces détachées auprès desquels on pourrait se fournir
a) pour les pales en composites :
Exemple de prix : 2 Pales "Dragon Wings"
(24 pieds / 7,44 mètres) $ 1,550.00
14) CT BRASIL : Composite Technology do Brasil LTDA
(Fabriquant de pales en composites y compris de pales d'hélicoptères
contrarotatifs).
Avenida Ayrton Senna, 2541, Rua A, Hangar E-039, Aeroporto de
Jacarepaguá - CEP: 22775-001, Barra da Tijuca - Rio de Janeiro/RJ, Tel.: (55-21) 2432 7156 / 2432 7157 / 2432
7158 / Fax: (55-21) 2432 7159
Marco Antônio Derito Greco, General
Manager : derito@ctbrasil.com.br
Ana Paula Maes, Executive Assistant
: anapaula@ctbrasil.com.br
http://www.ctbrasil.com.br/english/empresa/index.html
15) Helicopter Technologies Corporation
(HTC), Dürrheimerstr. 84. 78166 Donaueschingen. Tel.: 07 71 / 6 12 47-4 Fax:
-5. htc-helicopter@t-online.de
Site : www.htc-helicopter.de
16) Israel Aircraft Industries.
17) DHRUV (ex. A.L.H. Advanced Light Helicopter), Bangalore, Inde,
une division de HAL (voir adresse plus haut).
HAL India : http://www.hal-india.com/ et Sa division DHRUV : http://www.hal-india.com/exports/alh.asp
b) pour la tête de rotor contrarotative :
Les fabricants possibles ( ?) :
Ø Kamov,
Ø Gyrodyne
( ?) …
Etc …
c) Pour la maintenance et l’entretien d’hélicoptères
(tête de rotor, turbine à gaz, si solution moteur micro-turbine) :
En région parisienne : Héli-Union, Aéroport de
Toussus-le-Noble 78117 CHATEAUFORT, tél. : 01.53.78.08.60
16
Annexe : dossiers à constituer
- - études de
faisabilité.
- (Dans cette études,
montrer que toutes les questions _ stabilité, sécurité … _ que l’on peut
légitimement se poser, sont résolubles, par les solutions techniques
envisagées. Et que ces solutions sont réalisables avec les moyens
technologiques actuels).
- - dossier technique
avec tous les calculs de résistance des matériaux et des pièces,
- - tous les croquis
d'études et de calculs, et plans des pièces (chaque pièces de la tête du
rotor, en particulier).
- – les plans des
maîtres moules du/des volet(s) (c’est à dire de la dérive ou d’une sorte
d’empennage), éventuellement des pales et de la coque sellette (si en
résine), (à voir) …
- - dossier plans ISO :
châssis, tête de rotor, embrayage prélanceur sur tête de rotor et moteur,
support de compas et tableau de bord etc …
- – chiffrage de toutes
les pièces à commander ou à usiner / fabriquer spécialement.
- - liste des futurs fournisseurs
des différentes pièces,
- - liste des
industriels partenaires qui pourraient participer à son élaboration
pour : les pales, la sellette, le moteur, le/les réservoir(s), le
mât, le tableau de bord, le châssis tubulaire, les volets, l’embrayage prélanceur
sur tête de rotor et moteur,
- – chiffrage budget
global (avec engagement prix, devis et contrat signés avec fournisseurs),
- - cours théoriques
hélicoptère contra-rotatif ou ULM Autogire.


Tête
autogyre (source : http://autogire.nuxit.net/).
17 Bibliographie
Livres :
[1] Helicopter Theory, Wayne
Johnson , Dover Publications
(octobre 1994), 1089 pages (EUR 26,82
chez Amazon.fr ).
[2] Théorie élémentaire de l'hélicoptère, Roger
RALETZ, CEPADUES éditions, 03/1988, 80 Pages, 34 €.
[3] L'hélicoptère, théorie et pratique, Pierre LEFORT et Jacques HAMANN, Editeur
Chiron, 35 €.
[4] Apprentissage du pilotage d'hélicoptère,
Théorie et pratique, Pierre ASSELIN, Cégep de Chicoutimi, 1999,
Éditeur CQFA, Pages 161.
Sites Web :
[5] Sur la construction des pales d’hélicoptères
(Airfoils & blades) http://www.copters.com/aero/airfoils.html
[6] Sites sur la fabrication des pales d’hélicoptères :
http://membres.lycos.fr/aerodesign/pale-helicoptere.htm
[7]
“Flight control design for a coaxial helicopter Back”, Virginie Guerber,
Abstract: Optimisation through the H-inf Method, comparison with traditional
control, simulation through Matlab/Simulink.
[8] site sur la théorie de l’hélicoptère : Source :
Source : http://www.aerospaceweb.org/design/helicopter/ http://www.aerospaceweb.org/design/helicopter/momentum.shtml
[9] Helicopter Foundation International _ Fondation internationale des hélicoptères
_ (HFI) organisation à but non lucratif consacrée à préserver des objets
façonnés, des documents et des interviews enregistrées liées à l'histoire du
vol vertical. Site : http://www.hfi.rotor.com/ e-mail : WEBMANAGER@rotor.com
[10] Dictionnaire anglais-français
des faux-amis techniques :
http://www.english-for-techies.net/dictionaries/faux%20amis/faux_amis_C.htm
18 Terminologie
ADAV : Les avions à décollage et atterrissage vertical.
VTOL : Vertical Take off and Landing.
Les principales commandes d'un hélicoptère sont au nombre de
trois, chacune générant une réaction qu'il faut corriger avec l'une des deux
autres ou les deux à la fois :
Le cyclique : Cette commande permet
d'incliner le rotor de l'hélicoptère en avant, en arrière ou sur le côté. Une
action sur le manche cyclique provoque une inclinaison du rotor, par
rapport à son plan de rotation initial, et donc une modification de
l'assiette (inclinaison) de la machine.
Le collectif : Il permet de faire monter ou
descendre l'hélicoptère. Cette commande est située à gauche du siège du
pilote et elle agit sur toutes les pales du rotor en même temps.
Pédales d'anti-couple : Ce sont deux pédales commandées
par les pieds du pilote et elles agissent sur le rotor anti-couple situé à
l'arrière de l'hélicoptère. Principalement elles permettent d'adapter la
force (puissance) nécessaire pour annuler la rotation du fuselage autour de
l'axe du rotor principal. Mouvement provoqué par le couple du rotor
principal et le moteur. Mais aussi lors d'un vol stationnaire ou à très faible
vitesse de faire pivoter le fuselage à droite ou à gauche. En appuyant sur la
pédale de droite le fuselage pivote sur la droite et réciproquement pour la
pédale de gauche.
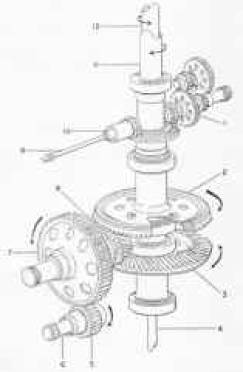
Tête de rotor contrarotatif
de Gyrodyne, à gauche. Schéma des commandes du Ka56 - la guêpe, à droite.
19 Pour contacter l’auteur de ce rapport - document
Benjamin LISAN
rue de la Fontaine du But, 75018 PARIS, France.
Tél. : +(33) 6.16.55.09.84 / +(33)1.42.62.49.65
E-mail : benjamin.lisan@free.fr
Pages web où se trouvent la documentation du projet (et
ainsi que sa documentation complémentaire) :
http://perso.wanadoo.fr/jardin.secret/EcritsScientifiques/Inventions/SpecProjetLibellule.htm
http://perso.wanadoo.fr/jardin.secret/EcritsScientifiques/Inventions/AutogyreAutonome.htm
http://perso.wanadoo.fr/jardin.secret/EcritsScientifiques/Inventions/DocComplAutogyreAutonome.htm
20 Annexe : type de moteurs de envisageables
a) Les moteurs de paramoteurs :
En général, tous ces moteurs sont 2 temps (et leur poids ne
dépassent pas les 20 kg).
|
Modèle |
Constructeur |
Puissance CH (et Hp) (°) |
Poussée statique |
Poids Kg (°) |
Commentaires |
|
D330 |
JPX (Fr) |
20 CV à 6500 tr / mn (19,74 Hp) |
70 kg hélice standard |
15.5 kg |
http://www.jpx.fr/ ,
2421.20 Euros |
|
D320 |
JPX (Fr) |
18 CV à 6500 tr/min (17,7 Hp) |
|
16,8 kg |
http://www.jpx.fr/ tout équipé, avec échappement |
|
Solo 210 |
Solo (De) |
14.5 cv (14,31 Hp) |
34 kg |
15 Kg ? |
http://www.solo-kleinmotoren.de/ ??? (2900 $ US ?) |
|
Snap 100 |
Ciso Motors (It) |
12,5 kw à 9000 rpm (16,76 Hp) |
|
|
|
|
M25-Y |
Cors’Air (It) |
25 cv à 7200 rpm (tr/mn) (24,675 Hp) |
|
55 Lbs 24,94 kg |
$5950.00 US |
|
Easy 100 |
Vittorazi (It) |
18 cv à 9.500 t/min (17,76 Hp) |
60 kg av. hélice 130 cm (56 kg av. hélice 122 cm). |
11 kg
(sans démarreur électrique) |
|
|
Fly 80 |
Vittorazi (It) |
15 cv à 10.500 t/min (14,8 Hp) |
53 kg |
11 kg |
Idem |
|
MZ 34 |
Black Hawk (?) |
32 hp (32,42 Cv) |
200 lbs 90,7 kg |
59 lbs 26,7 kg |
$5995.00 US / $4995 US |
|
MZ 100 (+) |
Black Hawk ? |
22 hp (22,29 Cv) |
125 lbs 56,69 kg |
50 lbs 22,67 kg |
$ 4795 US |
|
Black Devil |
Black Hawk ? |
25 hp (25,33 Cv) |
165 lbs 74,84 kg |
54 lbs 24,5 kg |
$ 4995 US |
|
|
Lazer |
??? |
|
|
Lazer Motor Cycles, 020
7267 3321 1, Belmont St, London, NW1
8HJ |
|
SD RDM 100 |
???? |
22 HP à 9000
trs (22,29 Cv) |
120 lbs 54,43 kg |
24 kg (53 lbs) |
$5275.00 US |
|
SD RDM 125 |
???? |
32 HP (32,42 Cv) |
138 lbs 62,59
kg |
55 lbs (24,94 kg) |
$5595.00 US |
|
Koenig ? |
Koenig ? |
24 HP (24,31 Cv) |
|
|
3 cylindres radial, $5800 Us (son constructeur en aurait arrêté la
fabrication). |
|
TOP 80 |
Power Jet ? |
13 hp (13,17 Cv) |
53 kg |
22 kg !!! |
http://www.blusky.co.za/flyproducts05.html (certainement un vieux modèle ou chiffres
faux) |
En conclusion, on tire que la plupart de ces moteurs de
paramoteurs ne sont pas assez puissant (hormi le MZ34).
b) Moteurs d’ULM (ou micro-hélicoptères ULM) :
|
Modèle |
Constructeur |
Puissance CH (et Hp) (°) |
Poussée statique |
Poids Kg (°) |
Commentaires |
|
Rotax 503 |
Rotax |
45,6 hp |
|
31,7 Kg |
2 T, 45 Hp @ 6500 rpm, à air |
|
Rotax 582 |
Rotax |
65 Hp |
|
37.3Kg à 41,8 kg |
2 temps, refroidissement à eau |
|
Hirth 7302 |
Göbler Hirth |
55 Hp |
|
34,1 kg |
2 temps, refroidissement à air |
|
Hirth 2706 |
Göbler Hirth |
65 Hp |
|
73 lbs à 79 lbs |
2 temps, refroidissement à air |
|
Hirth 3203 |
Göbler Hirth |
65 Hp |
|
73 lbs à 79 lbs 33,11 kg à 35,8
kg |
2 temps, 65Hp @ 6300 rpm,
refroidissement à air (+). |
|
HKS 700E |
HKS aviation |
60 hp |
|
49,1 à 55 kg |
4 temps (2 cyl). |
|
AeroTwin 65 |
AeroTwin |
65 Hp |
|
95 lbs / 43 kg |
4 temps |
(+) nu : 73 lbs /
33,1 kg. Avec
ventilateur de refroidissement, démarreur électrique et l'échappement : 79
lbs / 36 kg
La boîte de vitesse facultative ajoute 19 livres / 8,6 kg.
Ces moteurs _ malgré leur
poids (non idéal) _ pourraient correspondre à nos besoins, au niveau puissance
et donc poussée (voir annexe 20 ci-dessous). Tous ces chiffres devront être
re-vérifiées. Le moteur idéal serait celui qui développe 55 Hp et ne pèse que
30 kg ou moins.
Note :
bien sûr dans le choix du moteur, il faut tenir compte de son sens de rotation.
(°) conversion : 1 Ch / Cv = 0,736 Kw, 1 Hp (Usa, Uk) = 0,7457 KW [1 Ch = 0,987 Hp], 1 lb/lbs (livre) = 0,453592 kg,
1 Gallon = 3.785 Litres, 1 pieds = 0,31 m, 1 pouce = 2,54 cm.
(+) http://www.litetouchfilms.com/paramotors_bh_3specs.htm
21 Annexe : estimation de la puissance mini pour faire décoller un homme de 100 kg
Quelques éléments de réflexion :
Soit ce qui irait dans un sens positif, ce
« Scoot-air » a beaucoup moins de poids inutile que cet hélicoptère
civil (et on alors pourrait gagner dessus). Et donc, on obtiendrait de
meilleurs performances.
Soit le moteur a un moins bon rendement qu’une turbine (ce
qui semble être normalement le cas), et on n’est même pas sûr de soulever cette
charge de 107,2 g (Poids maximum au décollage).
D’ailleurs, en retirant les 40 kg de notre charge estimée
à vide de notre « Scoot-air », le poids maximum du pilote transporté, qu’on obtient par
calcul est de 67,2 kg (un pilote léger), ce qui est nettement
insatisfaisant.
On pourrait utiliser, comme en aéromodélisme, des carburants
spéciaux, à base de Nitro-méthanol (mélange à 5 % [15]),
pour augmenter la puissance du moteur, mais on risquerait alors
(peut-être ?) de surchauffer et d’user prématurément le moteur (en plus
ces carburants sont plus explosifs … avec risque alors de problèmes
concomitants d’autorisation).
Par ces calculs et estimations provisoires, on voit que réaliser un tel engin ne sera sûrement finalement pas si simple (dans l’état actuel des choses). Peut-être faudra-t-il une solution tout carbone (matériaux spéciaux) et carburants spéciaux.
On imagine, par la suite, plusieurs hypothèses et
scénario :
1) si le rendement poids/puissance de notre engin est
équivalent à celui d’un hélicoptère EC 1200B :
Avec l’hélicoptère Colibri EC120B d’Eurocopter, équipé d’une
turbine TURBOMECA Arrius 2F, on a les caractéristiques
suivantes au niveau poids et puissance, au décollage et en vol :
|
Caractéristiques de Poids |
kg |
lb |
|
• Poids à vide, modèle standard |
965 |
2127 |
|
• Charge utile |
750 |
1653 |
|
• Poids maximum au décollage |
1715 |
3781 |
Puissance
en ISA (système international), au niveau de la mer (+) :
|
Caractéristiques de Poids de puissances |
kW |
ch / cv |
shp |
|
• Puissance au décollage |
376 |
511 |
504 |
|
• Puissance maximum continue |
335 |
455 |
449 |
Ce qui donne, pour cet hélicoptère, un taux de 3,35 kg soulevé, par CH, au décollage (avec l’Arrius 2F).
Ce qui est excellent (mais solution coûteuse, « non
paramotoriste »).
(+) Attention, il y a un minuscule problème de conversion
entre Chevaux (CV/CH) et HorsePower (HP) :
1 CH / CV (unité
européenne) : 1 CH = 0,736 KW,
1 HP (HorsePower,
unité des USA et Angleterre) : 1 HP = 0,7457 KW.
1 CH ~= 0,987 HP. Source : http://www.thermexcel.com/french/tables/unitnext.htm
Conversion US / MKSA : 1 pieds = 0,31 mètre, 1 lb/lbs (livre(s)) = 0,453592
kg, 1 Ch / Cv ~ 1 Hp = 0,736 Kw.
Note : Si le moteur MZ34 (M) avec son rotor (R ) et
ses pales (P), avait la même efficacité au niveau de cet ensemble M-R-P (mais
ce n’est pas encore prouvé) que l’Arrius, il soulèverait alors avec ses 32
Ch/Cv (et ses 26,7 kg), un poids 107,2 kg. Et donc on est encore loin des 140 kg souhaités, dans nos
spécification.
b) si rendement équivalent à celui d’un hélicoptère
modèle réduit IROBOT :
Pour information, la société EOL (voir adresse plus haut) vend (pour 3000 €), un modèle réduit d’hélicoptère Eurocopter Tiger (de la marque IROBOT), pesant à vide 6,5 kg, et propulsé par un moteur thermique ZENOA de 4 CH (22 cm2), fonctionnant avec un mélange essence au nitro-méthane à 5 %. Ce qui fait pour ce dernier hélicoptère, un taux (ou rendement) de 1,625 kg par CH/Cv (source commercial Magasin EOL rue du Louvre, Paris).
Donc, un rendement nettement moins bon que pour l’hélicoptère à Turbine EC120B (en apparence, en tout cas).
Donc pour soulever 140 kg au
total, avec tel rendement, il faudrait une puissance de 86,15 CH ! On n’est plus alors
dans le domaine des paramoteurs ou des aéronefs ultra-légers ! On en est
loin.
c) si rendement équivalent à celui de l’hélicoptère « Airscooter » :
Celui-ci utilise un Moteur AeroTwin 65 HP (+), pesant 43 kg. Et d’après son concepteur, le poids de l’hélicoptère à vide « Airscooter II » serait de 70 kg ! et sa Charge utile transportée est de 158 kg, ce qui fait un poids au décollage de 228 kg. Donc, son rendement serait alors de : 3,5 kg par HP (3,546 Hg/Cv). Un très bon rendement [16] !
Donc pour soulever, nos 140 kg,
avec ce type de moteur (et un système M-R-P équivalent de l’Airscooter) ayant
un tel rendement, il nous faudrait alors un moteur, type AeroTwin (4 temps), de
40 Ch/Cv (et de 26 – 27 kg à vide)… On se rapprocherait alors de
l’esprit « paramoteur ».
Et le projet et son but seraient alors parfaitement réalisable (mais il vaut avant vérifier les données « Airscooter »).
Suggestion : faire réaliser ce moteur par la société AeroTwin.
Note : Ce moteur utiliserait un carburant d’avion léger (type Piper), donc plus coûteux que l’essence voiture.
(+) voir spécifications techniques détaillées de ce moteur sur : http://www.aerotwinmotors.com/pages/at_specs.htm
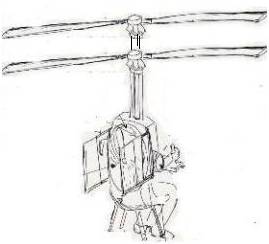
Le « scoot-air » _qu’on pourrait encore appeler la « Libellule » _,
muni ici d’une autre configuration pour son empennage (ici une double dérive).

Le
« Skywalker » de FSFreeware, simulateur de vol (www.fsfreeware.com : ce site a semble
avoir disparu).